You mean a good tuned inflightFFT-Notch agains a good tuned throttlebased-Notch ?
Probably are very similar, if they are properly tuned, and the EXPO/THR_MIN paramaters are correct.
You mean a good tuned inflightFFT-Notch agains a good tuned throttlebased-Notch ?
Probably are very similar, if they are properly tuned, and the EXPO/THR_MIN paramaters are correct.
To detect the accurate noise frequency as well after post filter setting.
Throttle based notch filter setting i wounder how does it work if drone has variable payload inflight?
What is the HNotch method?
The throttle will vary with the payload, hence the computer frequency will vary ad well if the EXPO/THR_MIN paramaters are correct.
It should not change after reboot, you should be able to go as low as you like
I have changed to 30 but after reboot it automatically changed to 50.
What did you change?
I have problems connecting to the new 4.4.0 SITL (ArduCopter.exe downloaded when using the Simulation Tab in Mission Planner) using TCP.
MissionPlanner can connect on TCP 127.0.0.1:5760 but when I disconnect and reconnect on port 5762, SITL seems to terminate.
DroneKit get’s no connection at all neither on port 5760 nor on 5762. After some time, SITL just closes the connection and DroneKit throws an error. Sometimes SITL keeps on running and just reports, that the connection was closed but sometimes it also terminates completely.
I checked again with the previous 4.3.7 and this still works as expeceted.
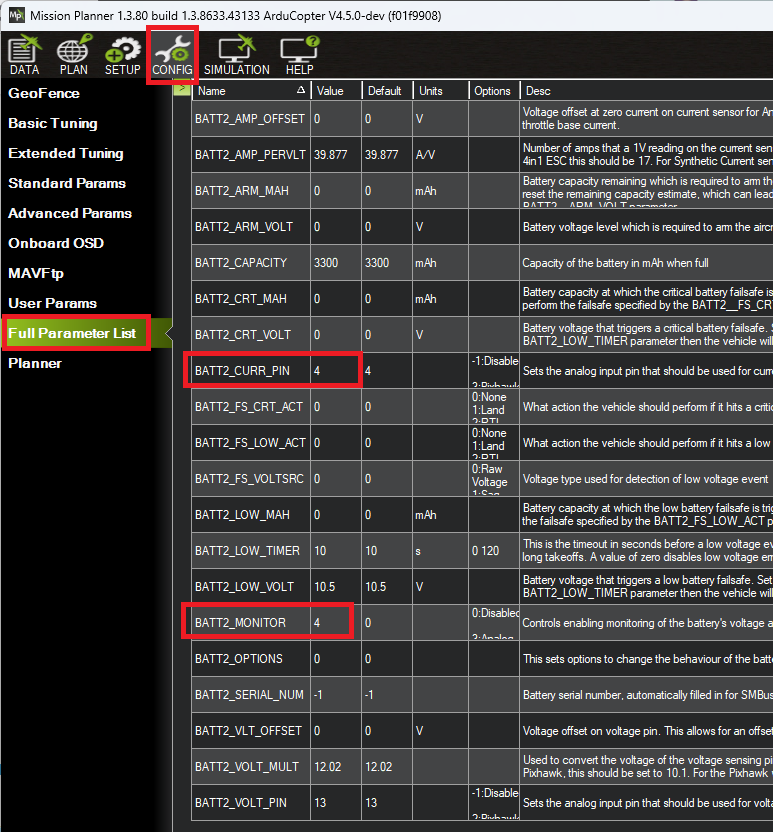
Hi, I can`t change the current pin in BATT2 for instance. I want to use the fuel PWM level as BATT2 but there is no BATT2_CURR_PIN to set as a GPIO pin. there is another way?
After batt monitor enabled you need to reboot or refresh parameters to get BATT_CURR_PIN parameters.
I know that already done, I can’t set the current pin on batt2
I agree with @kalai1219. The BATTx_ parameters are a little special in that they don’t all appear until the autopilot is rebooted. Some appear after a simple parameter refresh but not all. Also the parameters that appear depend upon the BATTx_MONITOR that has been selected. So perhaps you didn’t set BATTx_MONITOR = 4 (Voltage and Current)?
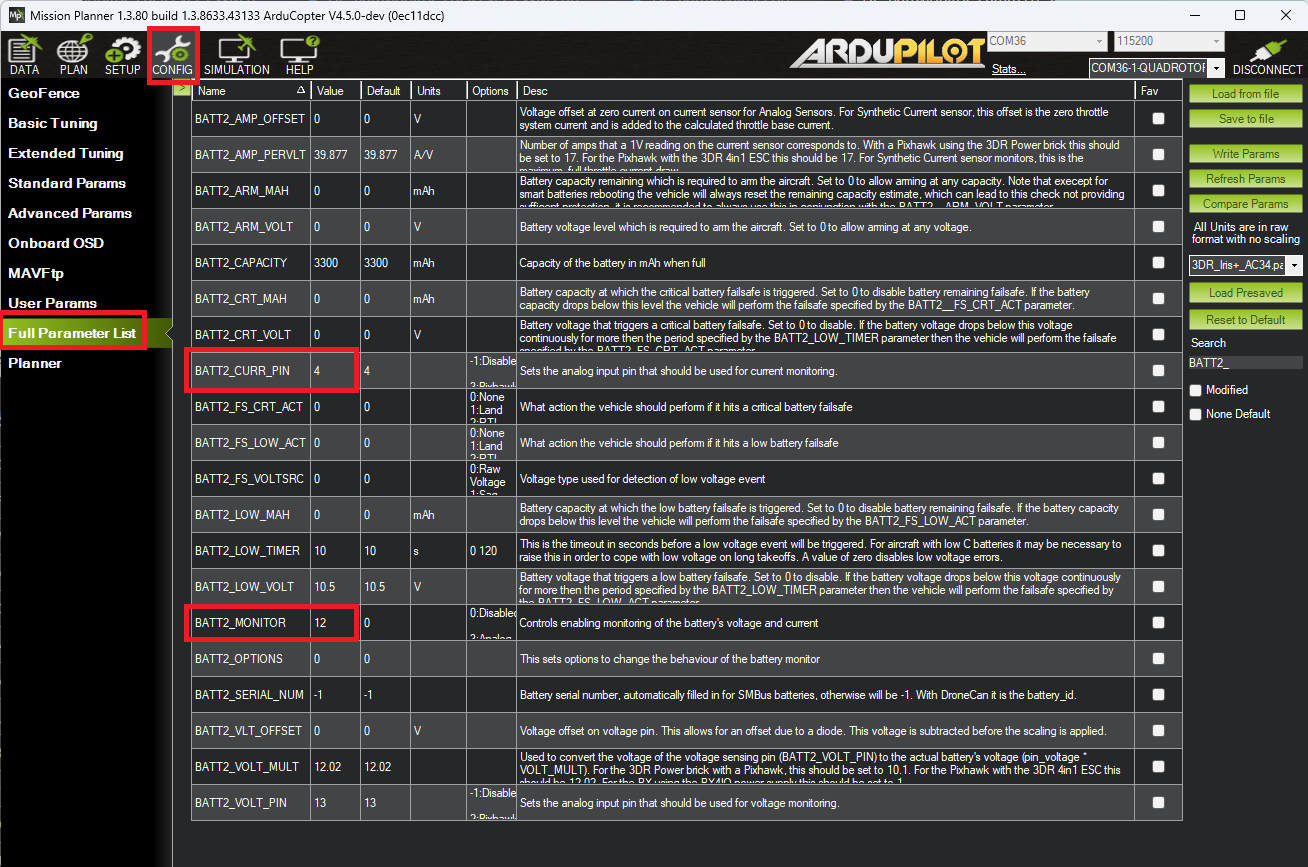
To use it as liquid level PWM I need to set the BATT2_MONITOR to 12 and then the I don’t have the option to choose current pin
Perhaps I’m misunderstanding something but when I set BATT2_MONITOR to 12 I see the CURR_PIN
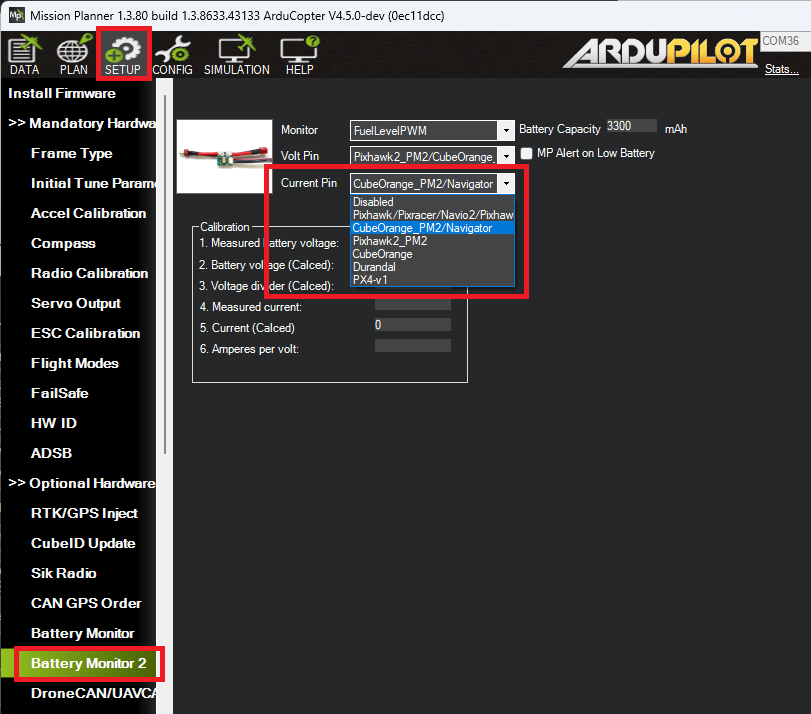
Ah, maybe you’re trying to use the Mission Planner’s Battery Monitor 2 page which may not provide the full list of possible pins. If this is the case, then I think you should stick with the full parameter list (shown above).
Hi all, two issues with this version 4.4.0 (I upgraded from a two year old FW so this may have happened in previous versions)
If I have to go back to previous version then fine but when did this change so I can go back?
BTW OA_type is set to 0
in survey grid the drone is now back to going to the waypoint, stopping turning then going to the next WP. This was not the behavior before where it would slow down and do a nice arc to the next waypoint. (without using spline) This was sweet. When did this change back to stopping? and how do it fix it?
When adjusting the landing position in RTL the drone can barely be moved with full stick movements. It would take about 10 seconds to move it 5 feet. This is dangerous as you pretty much can’t re-position the drone in any timely fashion. The drone banks quit well at first but then it re-levels on it’s own and just sits there barely moving even with full stick movements. In pos_hold it files as expected. This is only happening on repositioning during RTL that I can see.
Any help appreciated.
Hi @steve,
I suspect that the issue is the WPNAV_ACCEL parameter has been set very low. The default is 250 so perhaps try something closer to that.
If you have a log file then we can look into this further.
Thanks greatly for the reply.
WPNAV_ACCEL , 100
WPNAV_ACCEL_C, 0
WPNAV_ACCEL_Z, 100
WPNAV_JERK, 1
All were the same on FW 4.1.5 (except ACCEL_C did not exist)
Slower repositioning during landing in RTL (or Land mode) is a change in behaviour introduced in 4.3 and the top speed is 0.5 x WPNAV_ACCEL. So with WPNAV_ACCEL=100 it will be 50cm/s. So 5 feet is 1.5m so that should take about 3 or 4 seconds. We have thought of adding a parameter to allow users to directly change this but we got through 4.3 without anyone requesting it so I suspect there’s something else going on in the vehicle configuration that is making it especially slow.
… a log file would be great. As we say, it’s all guesswork without a log file (aka onboard log, aka .bin log).
Hi @rmackay9 Please see attached log. Everything was perfect until I did the upgrade.
When I tried to load my parameters it stated 62 were missing, I spent an entire day trying to get MP not to say it was missing all the params (yes I realize you have to load it twice etc.) finally I gave up and just worked with what it loaded fixing all the things manually as I went.
Also the static notch filter is now greyed out in MP, not sure why that is either.
Sounds like Scurve was introduced after 4.0.7
We have hundreds of flights as it was with no issue. It would be nice if major changes like this were optional ![]()
My log is too large to upload here I will have to put it somewhere and link it.
Here is the link
5 feet in 4 seconds is waaaay too slow… can we get an adjustable param that we can put that back to 1.0x WPNAV or something to that effect? It should just act the same as if you are in POS hold mode.
The reasoning is you are used to flying around in Pos hold mode (as we do for the first flight of every day to ensure it holds position before sending it off on it’s mission) then all of a sudden in RTL it behaves completely differently. This is not good for the pilot.
I think I will go back to 4.2 and see if that at least gets the RTL behavior back (there is no way I can return the drone to my client with RTL movement so different than before). I am doubtful it will correct the waypoint navigation issue.
I would have stayed on my previous version forever but for some reason UAVCAN kept thinking my compass was missing randomly. Which is strange because all our drone are on the same FW and this was the only one which would get a messed up compass. I have 5 drones with about 200-300 hours on each. This is the first time I have had so much trouble.