you are super. auto task scheduling Do you have any work on Wpnav Radius determination command for each waypoint?
Ok you should try 3rd, 4th and 5th IMUs if using MP
@andyp1per
The results are in:
3rd. IMU

4th. IMU
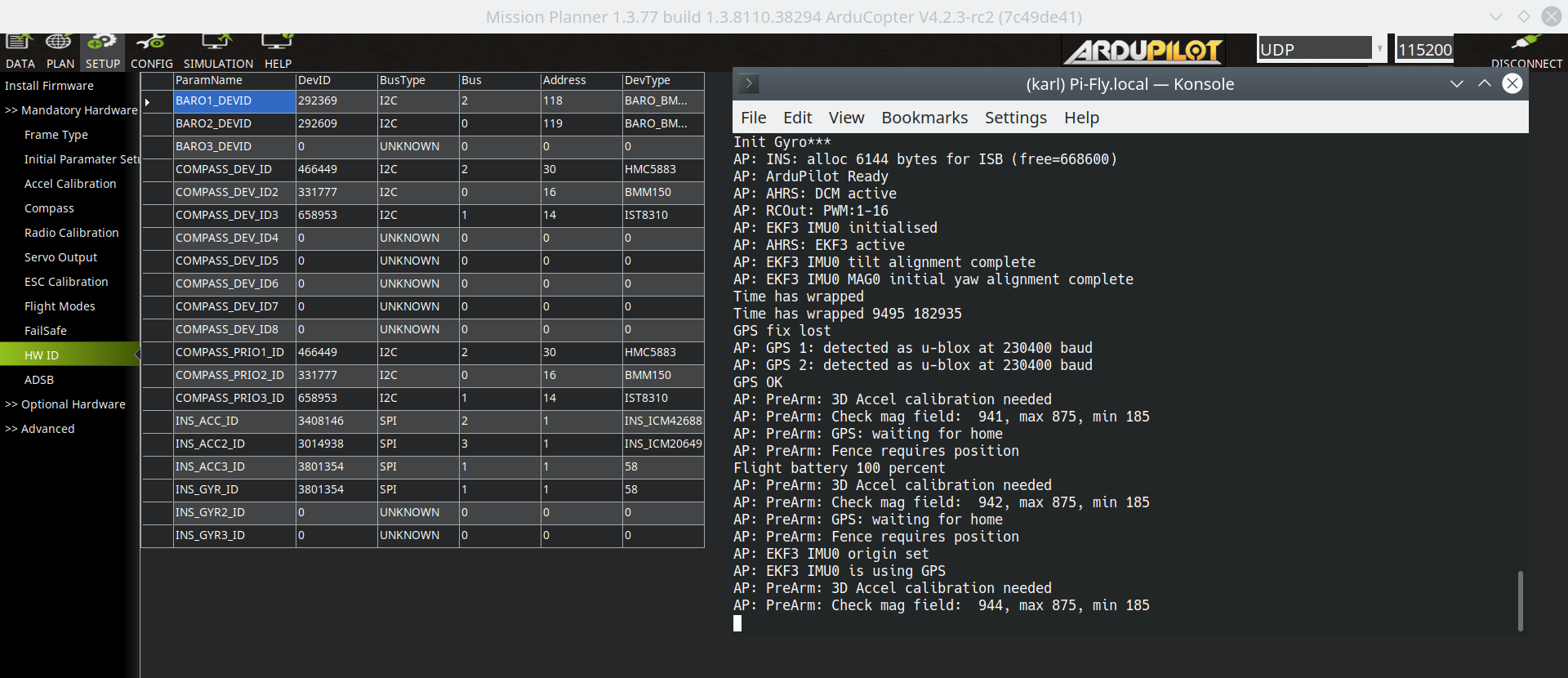
5th. IMU
Would appear it’s the ICM-42670-P that’s causing the trouble
Something is not right here - I don’t see a picture with just the 42688 enabled. Can you try 1st and then 2nd gyro to see if it comes out as one of those?
@andyp1per
Hope you can make sense of this,…cause I certainly can’t.
Did check those other two and would appear it’s the 2nd. and the 5th. that are causing trouble. - No idea how that works,…unless sensor ID/ signal channel is somehow doubled up.
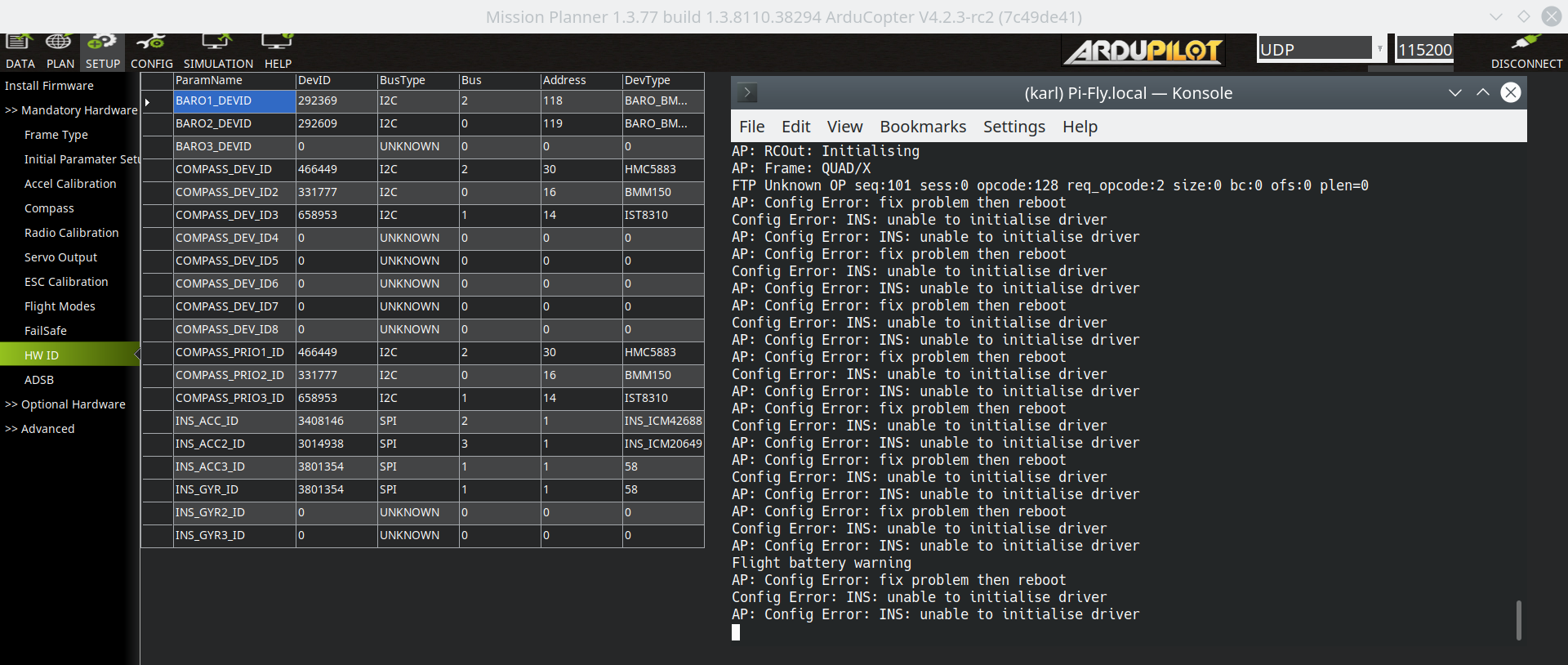
1st. IMU
2nd. IMU

So, I’ve figured If the 2nd. the 5th. are bad, what would happen if I activated the others?
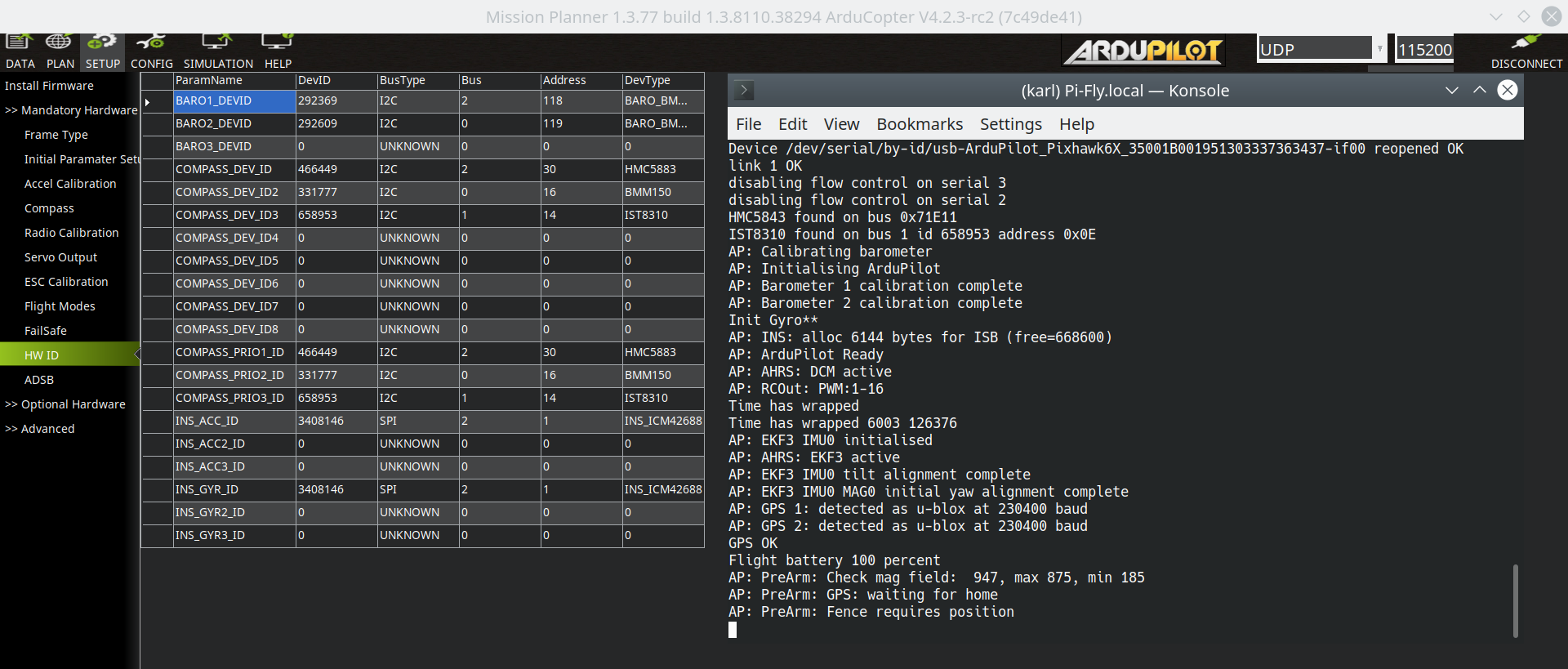
1st, 3rd, & 4th IMU

UPDATE: After trying all sort of combinations I’ve discovered that the HWID page doesn’t always update despite Pixhawk being re-booted after each change.
…my head is spinning now. May have to double check some settings again tomorrow.
The “unable to initialize driver” message is simply saying it can’t find an IMU. Of the settings that give you a single working IMU, which gives you the “gyros not healthy” message?
@andyp1per
Ok. Just been through all the single IMU options again and been refreshing the HWID page each time.
The outcome:
- The 3rd. and 4th. trigger the “gyro unhealthy” message
- The 2nd., 5th.,6th.,&7th. trigger a “unable to initialize driver” message
- The interesting thing is the 4th. & 5th. are the only ones with the “58” Dev Type
So, essentially it leaves only the 1st. which doesn’t cause any issues at all.
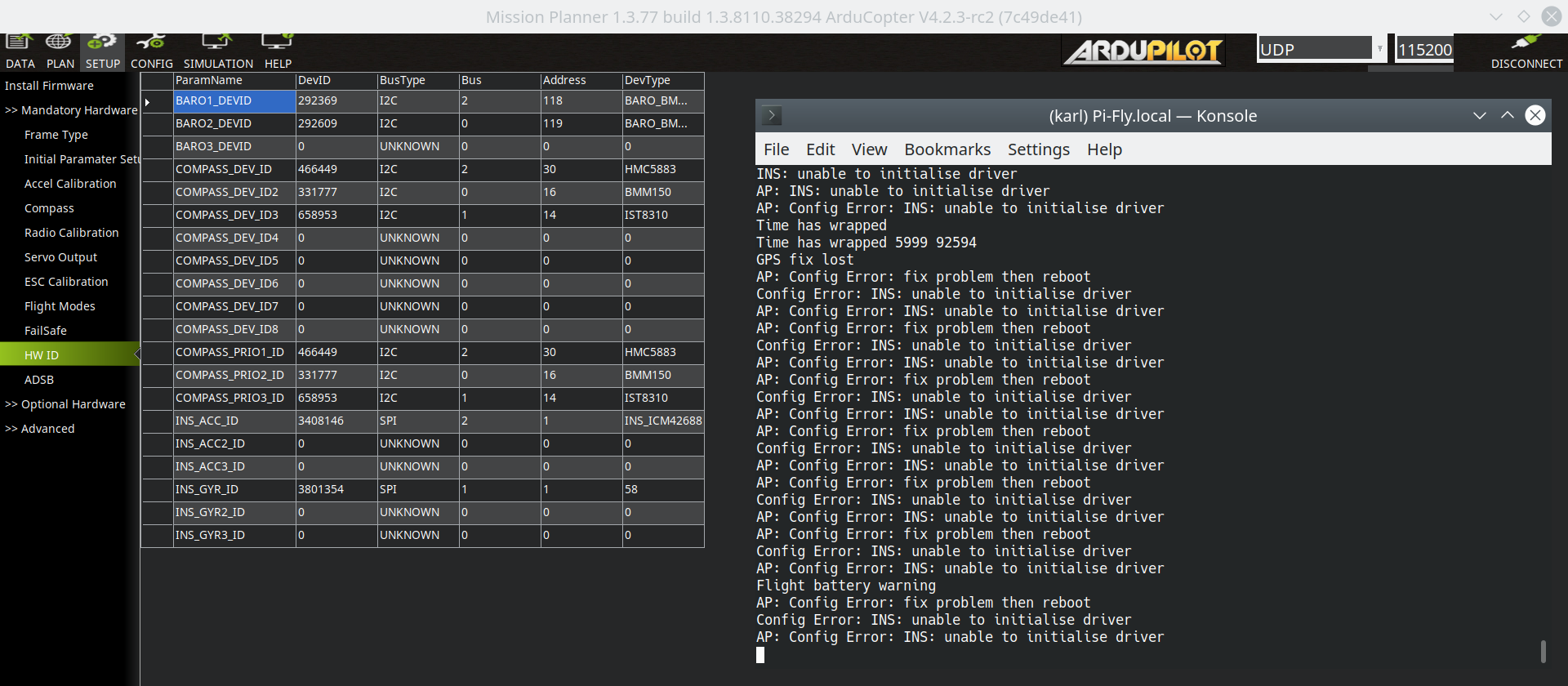
4th.

5th.
On the upside: After disabling the 3rd.&4th IMU I was able to perform a gyro calibration as expected. (using QGC daily) …but I guess not much point with only one sensor working to full extend.