@rmackay9 @tridge The PR works.
For anyone else who are testing, these are the parameters.
GPS_TYPE= 22 (DroneCAN-MovingBaseline-Base)
GPS_TYPE2= 23 (DroneCAN-MovingBaseline-Rover)
GPS_AUTO_CONFIG= 2 (Enable automatic configuration for DroneCAN)
GPS_AUTO_SWITCH= 1
GPS_DRV_OPTIONS= 8 (Use dedicated CAN port between GPSs for moving baseline)
EK3_SRC1_YAW= 2 (GPS)
GPS1_CAN_OVRIDE and GPS2_CAN_OVRIDE based on your node. Option is available under CAN GPS Order on MP.
Set GPS_POS1_X,Y,Z and GPS_POS2_X,Y,Z based on your setup. Recommended distance between GPS is 30cm.
On the AP-Periph side, make sure define GPS_MOVING_BASELINE 1 is defined.
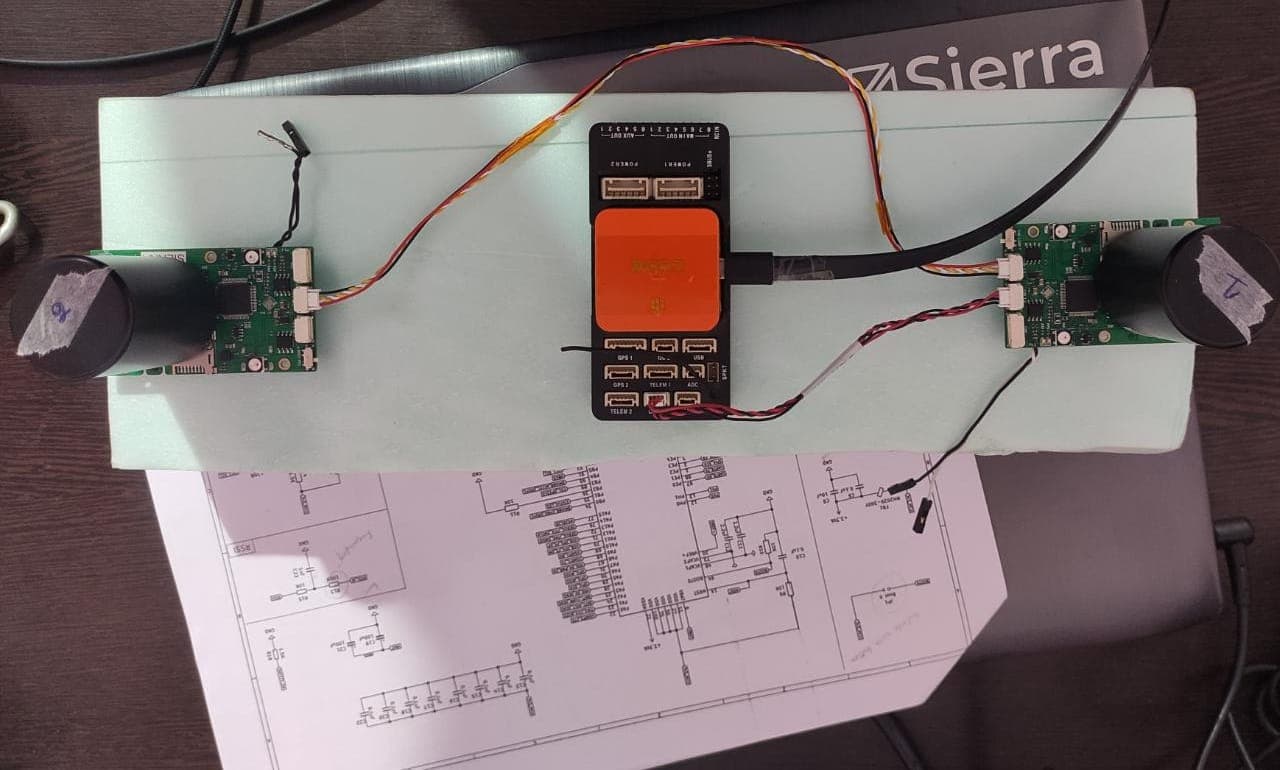
Below is image of the setup!

1 Like