Good afternoon,
What happened to you looks very similar to this:
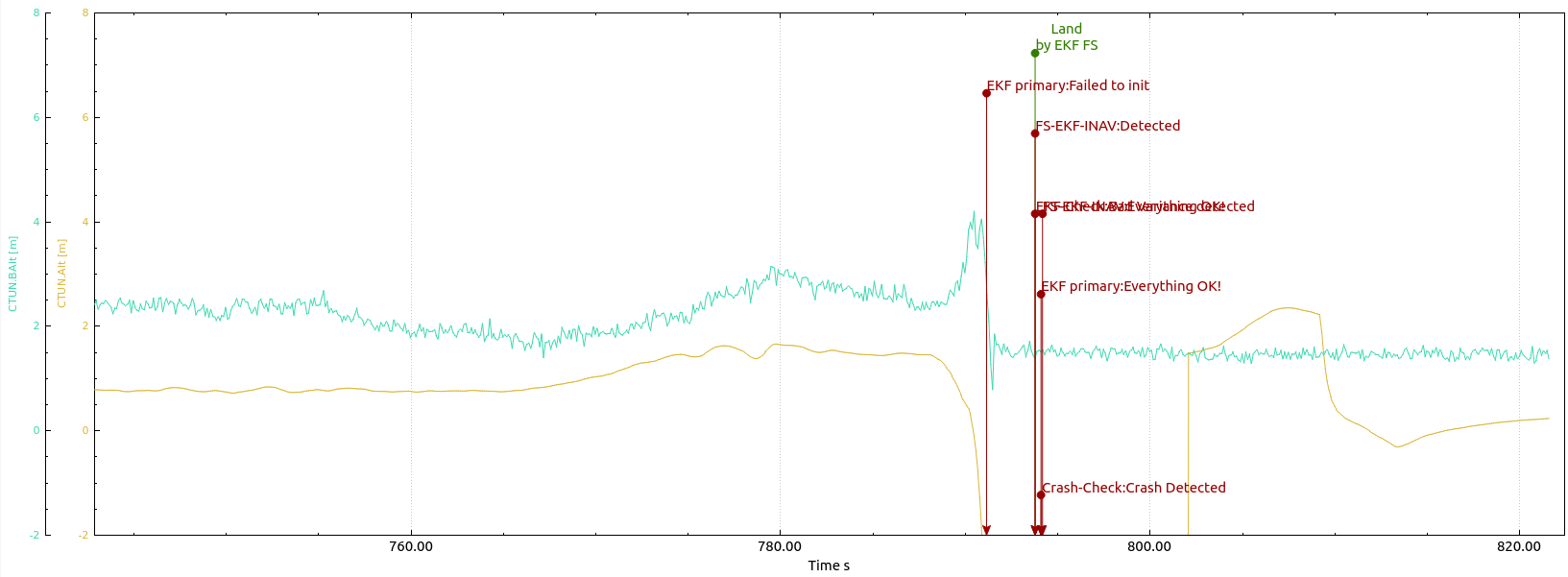
Checking your log, it is clear that your altitude estimation was out of control, and the drone was climbing when it was supposed to go down. The landing mode does not help since it still requires altitude control which needs a good altitude estimation. Observe how different was the Kalman filter estimation with respect to the barometer. It thinks is going down when actually is going up; the barometer is consistent with the video:

Eventually, the fail-safe of the Kalman filter commands to land which does not happen because the altitude estimation is fooling the control at the end of the flight: