Just tested this last release and without any doubt : the best release I’ve ever tested ! No more crashes, no more error messages, much more stability with EKF2 and EKF3 algorithms management, thank you very much @rmackay9 !
1 Like
@rmackay9 Why in this new firmware the second barometer is not logged? I use a CUAV V5+ and it has two barometers.
Only one MS5611 barometer is listed in the specs for V5+
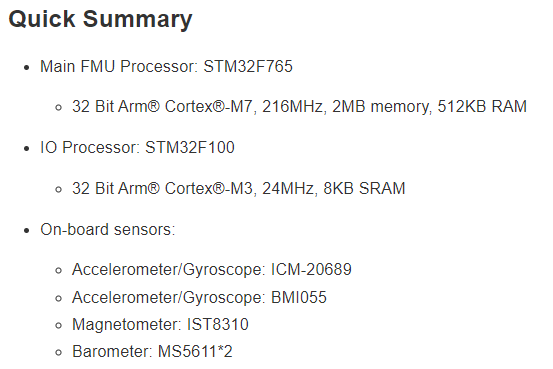
Ah I see what you mean, the “times two” thing.
In the circuit diagram there is one MS5611 on the V5+ Core board connected to SPI6, and one on the isolated IMU board connected to SPI4.
Did two baros show in earlier versions of Arducopter?
What shows up in MissionPlanner HWID screen?
The hardware definition is based on FMUV5 and SPI busses have these devices by default
#SPI devices
SPIDEV ms5611 SPI4 DEVID1 MS5611_CS MODE3 20MHZ 20MHZ
SPIDEV icm20689 SPI1 DEVID1 ICM20689_CS MODE3 2MHZ 8MHZ
SPIDEV icm20602 SPI1 DEVID2 ICM20602_CS MODE3 2MHZ 8MHZ
SPIDEV bmi055_g SPI1 DEVID3 BMI055_G_CS MODE3 10MHZ 10MHZ
SPIDEV bmi055_a SPI1 DEVID4 BMI055_A_CS MODE3 10MHZ 10MHZ
SPIDEV ramtron SPI2 DEVID1 FRAM_CS MODE3 8MHZ 8MHZ
and this section you can uncomment and build firmware with the second baro if you need it, but note it says SPI5 instead of SPI6 as per the circuit diagram.
#uncomment block below to enable a 2nd MS5611 baro on SPI5
#PF7 SPI5_SCK SPI5
#PF8 SPI5_MISO SPI5
#PF9 SPI5_MOSI SPI5
#SPIDEV ms5611_spi5 SPI5 DEVID1 EXTERNAL1_CS1 MODE3 20MHZ 20MHZ
#undef PI10
#PI10 EXTERNAL1_CS2 OUTPUT LOW
#BARO MS56XX SPI:ms5611_spi5
Actually I think two of the same baros in the FC probably wouldnt be as much help as having another baro in the GPS unit (up above the prop wash)
The fmuv5 hwdef file hasn’t changed in quite some time.
@xfacta I found a log that it is possible to see both barometers, but I am not sure of the firmware and FC version.
https://drive.google.com/file/d/1R9r61I1Ax2woBaBgKtD_uxNtSqyr9yEL/view?usp=sharing
You said that it is more useful to use the barometer of the GPS instead of having another one in the FC. But if there is a problem with the FC barometer which is the main source of the EKF, will it be disregarded and the EKF will use the Baro information from the GPS?
yes, if you use two EKF lanes and make each lane use just one of the two Baros
This one:
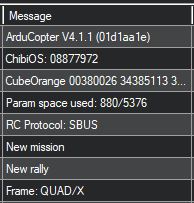
From the Device ID’s
![]()
![]()
Got it, it’s clear. I don’t know if there is a need to enable a second line just to have a second sensor, I find it difficult for the barometer to give a problem.
Thank you Dave. So I confused the cubeorange with the V5+ that I also use.