Can the vertical BendyRouler be used with two unidirectional rangefinders poiniting forward and down? Or do you need a 360° lidar for that?
It would be interesting to use a 360° Lidar, but rotated 90° on it´s side to basically measure the terrain directly in the flight path. This may also be suitable for fixed wing surface tracking.
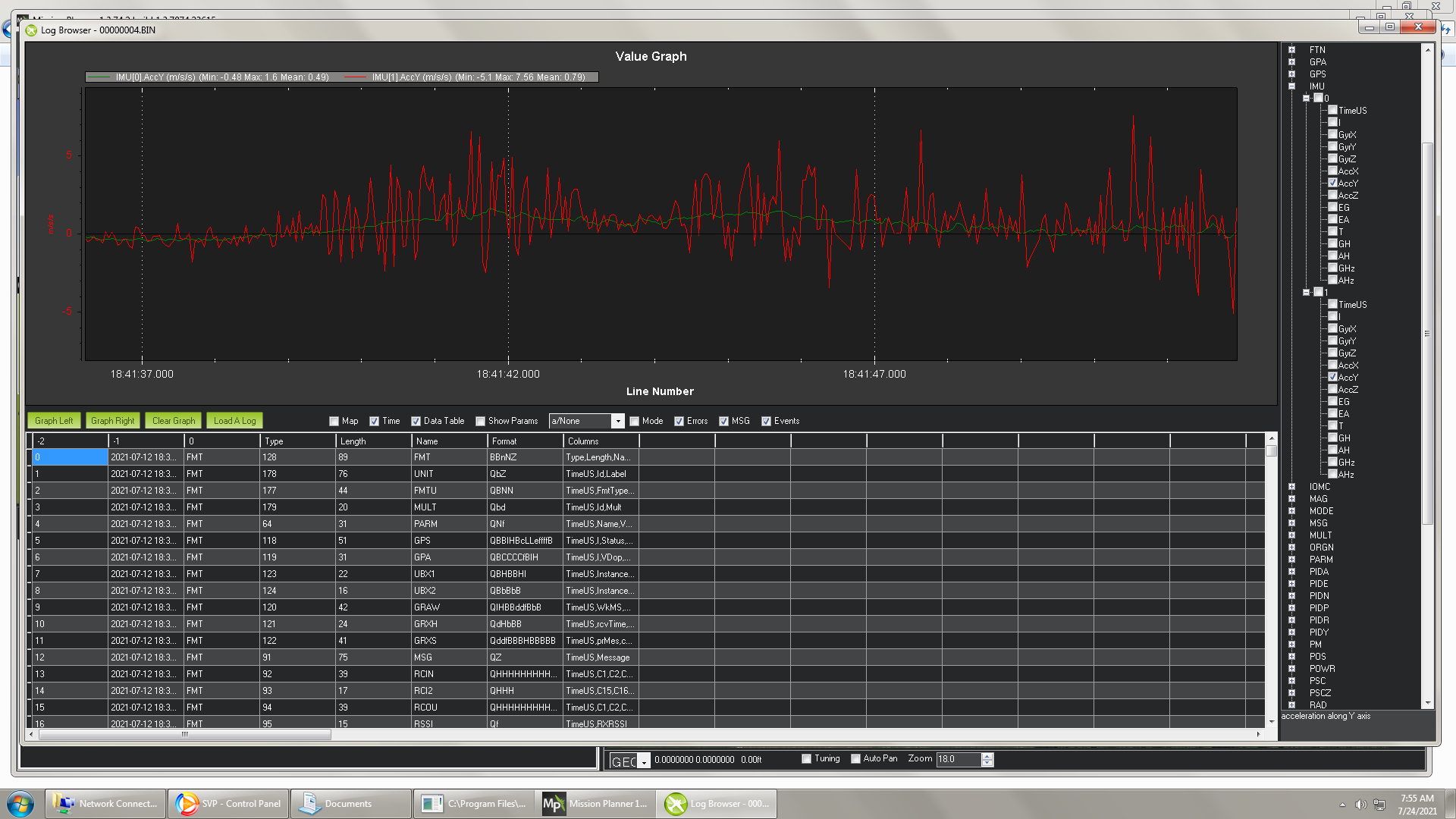
Is it because I don’t have IMU_FAST logging option? I was looking into vibration after watching Yuri’s latest youtube video. Thinking I should probably not look at the IMU accx… etc values because maybe its not all being captured by the logging and I should instead look at the vibex… Old habits hard to overcome (used to look at acc values before the vibe was added maybe 5-6 yrs ago).
Often I make mistakes so maybe this is some user error?
I forgot to mention its an old log as I haven’t flown recently. So any parameter updates (like randy asked me to turn off the onboard mag) will show up in my next flights. Waiting for beta6 as it restores my lcd I will post an update to this when I next fly
I wonder if this could be an electrical issue. The multirotors are kept in my basement where the humidity this summer has been pegged at 99% on my digital meter for a few months and now with a little dryer weather its down to 85%. I had a transmitter short out, which worked after I removed some solder debris and washed any potential flux off with iso alcohol. My television screen was full of artifacts while it was at its most humid. Since its dried a bit its returned to normal. I wonder if extreme humidity and rust/shorting is causing my strange graph? Something to consider
Surprisingly I found that this somehow related to logging. When logging is disabled or LOG_DISARMED=1 - this doesn’t repro.
So I assume with default config (logging enabled + LOG_DISARMED=0) in the moment of arming the log initialization could introduce some lag to the EKF system.
EDIT: this happens on iFlight BeastF7 (internal mem chip)
The initial log setup on arming is pretty expensive - we throw a ton of data into the logs and the flash chips are not very fast. In addition I don’t think I was able to give the flash chip on the Beast F7 its own DMA channel, so its competing with the IMU most likely as well. Net-net - the CPU and DMA load could easily cause the EKF to get out of whack IMO.
Thanks, that’s makes sense.
Now I’m almost sure this could be a real problem: if I take-off the copter right after first arming (when the climb rate still jumping up and down) then I may have some unexpected behaviors, like I’ve described in Copter-4.1.0-beta4 release for beta testing
Also in such cases I often see the climb rate on my OSD has a constant offset of -0.3…-0.6 m/s. That’s is preventing copter from safe landing detection as well.
I tell a lie. dataflash has dedicated DMA channels on that board - so there is no contention. So this is probably more subtle and related to CPU load. That said log writes should not require CPU because they use DMA. So I remain convinced that its down to the flurry of logging activity on arming, but what this is actually provoking I am not sure.
Hello, is there a way to retrieve this firmware from my cube black? Before updating to a newer firmware like the stable 4.1.0, is there a way to download this beta-5 version or do a backup from my autopilot?
Use the STM32CubeProgrammer be carefull to put in the correct amount of your memory AP, ex:1MB corresponds to 0x100000; 2MB= 0x200000. Read the complete content and save it! This way you will have everything including the caliration, etc. Later you can always download it, its very fast.

 I will post an update to this when I next fly
I will post an update to this when I next fly