If you’re using MP’s Install Firmware screen then the regular procedure (plug in the USB, click on one of the icons) will install the correct build for the board. MP detects what board is plugged in and then loads the correct firmware. https://ardupilot.org/copter/docs/common-loading-firmware-onto-pixhawk.html
1 Like
Thanks @rmackay9 Everything seemed to go well on the firmware-
2 questions…
Currently no external compass is connected…I calibrated accelerometers and compass. No headings are showing but autopilot location looks good
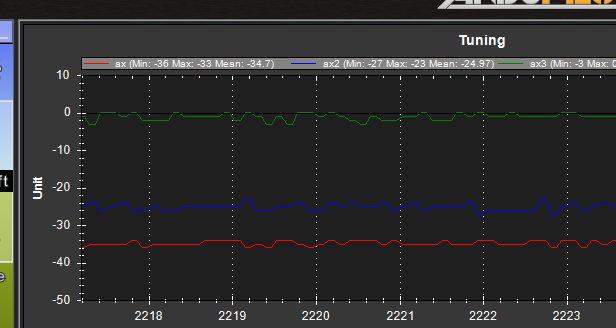
Other question is issue I have seen on some black cubes …Im graphing the 3 accelorometers on the bench 2 of the three graph at different units? exmple x axis …-25,-35 and the third is at 0… at what point do I need to be concerned that the 3 track differently?
Thanks
…
Thanks