This is huge!! I will be ritually removing the beta sticker.  a new year and a reborn flight controller: good times!
a new year and a reborn flight controller: good times!
2 Likes
if Copter 4.0 firmware can be upload to Pixhawk with 1MB ( 2.4.8 ver ? )
I’m not sure if this is tongue in cheek or serious. But Microsoft Windows crashing on your computer is certainly not related to ArduCopter 4.0.
Yes, it will flash to the 1MB 2.4.8 (done it) but there are some features that are not supported. Lua scripting is one.
3 Likes
Does this statement apply to the Here2 Service Bulletin Scale Factor Adjustment?
Or are we still required to redo compass calibration.
EDIT: Also, Here2 CAN with cube black is still being recognized as Compass 3 instead of 1.
It is time to go back 
2 Likes
As @darrell said, an amazing amount of work! A million thanks @rmackay9 @tridge @hwurzburg et al !
2 Likes
Good work to all Ardupilot developers! I will be testing this very soon and will post if anything seems off.
2 Likes
@Pedals2Paddles actually it is…
@a123456 Are you using a Cube? Windows 7?
This blue screen can happen on older versions of Windows if you have old drivers. Download the new drivers here: https://discuss.cubepilot.org/t/windows-drivers-for-cubes-direct-install/1539. You should be able install Copter 4.0 after updating. Alternatively, you can use Windows 10.
Right, but that’s not a firmware problem or an ArduCopter 4 problem. It’s a Windows driver problem. Relevant problem and solution, since probably not the last time it will happen. I’m just saying it’s not a problem or fault in ArduCopter or the firmware.
Thanks Tridge for your reply . Thanks for this great improvment for moving baseline configuration . Actually I’m testing ardusimple stand alone and it work well . On ublox center i recive rel_pos_ned sentence with gps heading estimation . If i would connect it directly to vrbrain how i configure the parameter ? I don’t need to configure 2 gps input but only one . What’s your suggestion ? GPS_TYPE as 18 could work as moving baseline rover ?
And then use EKF3, and set EK3_MAG_CAL=5. It could work with ardusimple connected to standard gps port without consider magnetometer?
Best Roberto
1 Like
If you are using Copter 4.0 then you won’t use GPS_TYPE=18, you would use type 2. Type 17 and 18 are for the new autoconfig approach in my PR.
If you’re getting the RELPOSNED messages then the key is the relative GPS position settings in GPS_POS*. You must set the two GPS modules positions in the vehicle. ArduPilot will check that the RELPOSNED distance is within 20% of the distance between the two GPS modules as given by the GPS_POS parameters.
Recalibrate in the open with a gps lock
The improvement to CAN and compasses is still coming, You can follow the process of getting a new function like this into Ardupilot here.
It is an amazing amount of work not only for Siddharth who is doing it, but also for Tridge and the team who meticulously go through every line of code and every interaction with the wider codebase to ensure that the system behaves exactly as planned by the time it gets to you
I’ve added this blue screen of death on Windows to our Copter-4.0 issues list so we won’t forget about it.
we’ve worked with this user on this one and it only happens when connected to a usb2 port, and not on a usb3 port.
1 Like
I don’t know about you, but both of my 2.4.8s are 2Mb
Are your boards detected as FMUv2 or FMUv3?
HINT: Both of my 2.4.8s came with an old bootloader and they were both detected as FMUv2. When I updated the bootloader both come up as FMUv3.
3 Likes
I asked before buy it.
I see in description 1Mb flash but i dont sure if its true ( sellers not always know what selling ) , will check tommorow.
Thank you.
To update the bootloader you can use either qGC or Mission Planner
https://docs.px4.io/v1.9.0/en/flight_controller/silicon_errata.html
https://ardupilot.org/dev/docs/bootloader.html
I have used both methods. Using Mission Planner is much easier…
1 Like
Connect to QGC and select the firmware tab. Restart the board and it will tell you how much flash it has:
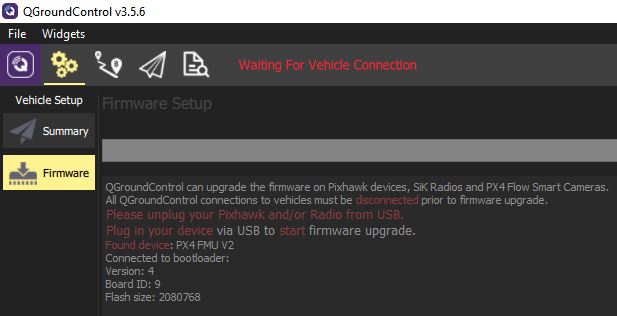
BTW-You will notice QGC identifies this 2.4.8 as Fmuv2. But the Bootloader has been updated and Mission Planner see’s it as Fmuv3:

1 Like