@Antonio, it’s probably an issue with the bootloader on the board not being recognised. I think MichaelOborne has a list of recognised bootloaders that the MP look at when it’s trying to decide what firmware to load. So that list just needs to be extended with the signature on the bootloader of the board you’ve got. I have no idea how to do that though.
By the way 3.5.4-rc2 and the official 3.5.4 are exactly the same except for the name.
@Marc: on “stable” folder I was looking on sub-folder “PX$-quad” and there is only 3.4.6. On sub-folder “PX4” I can find official 3.5.4.
Thanks.
@Randy: I will contact Michael in order to check with him how to overcome the problem.
thanks all
I’ve tested serial5 telemetry for frsky and it works fine for the very basi.
Now I’m going to implement an HUB on my Taranis Plus following this guide: http://ilihack.github.io/LuaPilot_Taranis_Telemetry/
thats great , can you just please tell me what kind of hardware is needed to conect telem5 to frsky ,do we need something like tenesy board , or some other hardware …
@drvic I’m using a smple uart to SPort converter as in the figure
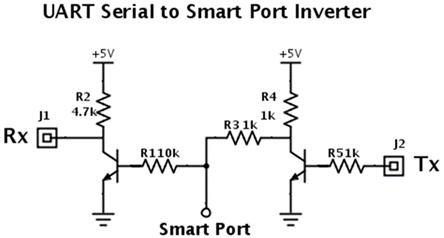
from the guidelines here.
Up to know I’ve checked whether the messages are flowing to SPort of my X8R FrSky module and we see everything is ok.
I’m going to implement a simple HUD to check main parameters using this script.
More details on FrSky telemetry on ardupilot wiki (here)
I’ve not checked but I think it is possible to use as well the C&T FlightDeck.

great , shure will try this , but if you could just tell me what transistors are those … just any npn , or …
I’ve used the BC547 but I would assume and npn is ok
Hello!!! I had bad success with Auto Tune in 3.5.4. Three atemts and the three of them crash. I do not understand what is wrong. I upload the log file for help please.
sorry to hear that , well I realy dont know why you had chrash in autotune , but I shure know how do you fell , I had it to … TWICE !!! , bouth times on starting autotune pitch … it just droped after seckond pitching …
Thanks for your supporting drvic1!!! Yes is very bad feeling particularly when you do not know what is cause it. Let see if someone can help me!
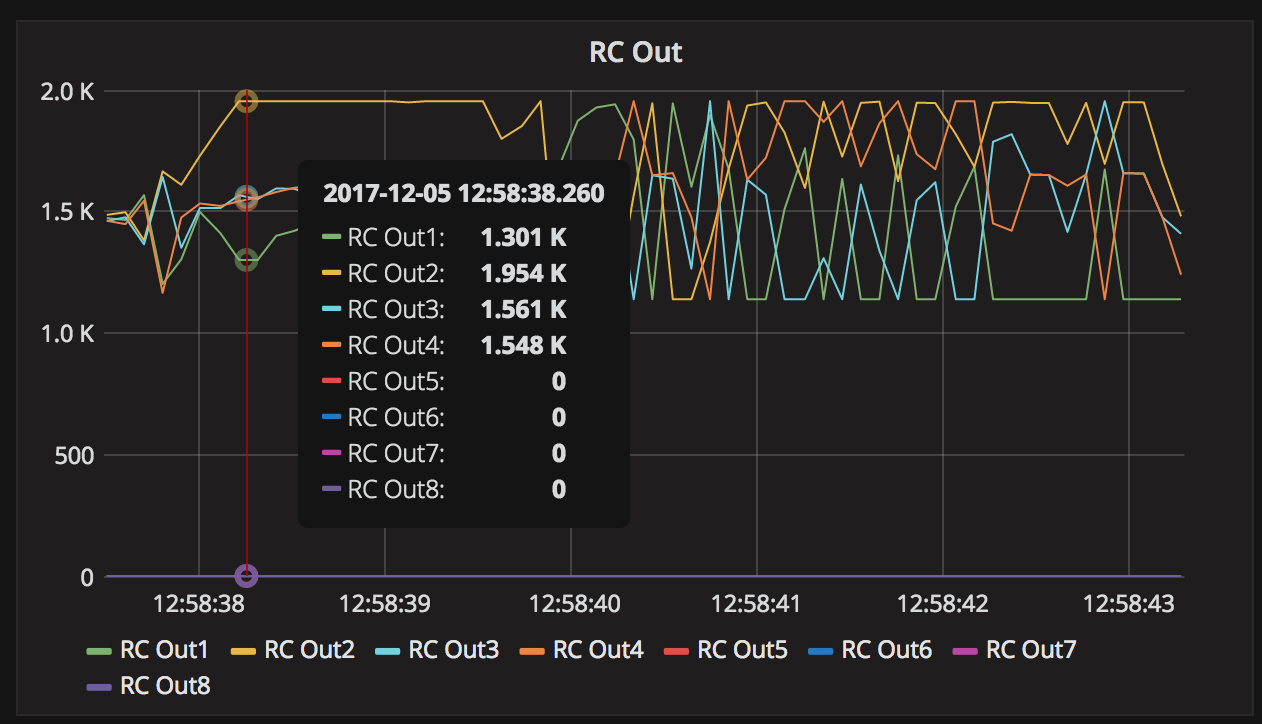
I seckond doub it is hardware failure , I had desinc on my mot 4 and 7 in autotune before charsh…
Ops…why?..what cause this? Do you thing that is an bad esc or something else? Thank you fnoop!!!
or someone can see something else …
1 Like
HI,
Thank you for the update. I was using radiolink AT9 and R9DS receiver on copter V3.3.3 and i have connected the receiver in Sbus mode. it was working fine but sees new update (V3.5.4) doesn’t corporate with my radio set. my FMU is loosing signals from Transmitter time to time.
Please help.
Thank you,
Dasun.
so with this update You can connect direct FC to RX frsky, or with cable converter? Now I’m using teensy
You can already connect the Pixhawk to a Frsky X-series RX using the RCIN and SBUS ports with a standard servo cable.
He’s talking about telemetry using a Teensy to convert Mavllink to Frsky telemetry protocol.
Native Frsky telemetry has been supported in Arducopter since V3.4 a Teensy is not required. Unless you have a PIxRacer an adapter is required but this is simple and cheap to build or you can get one from C&T.
http://ardupilot.org/copter/docs/common-frsky-telemetry.html