It’s a possible too , my new frame made on PVC , yes it’s PVC base frame also you are right there is some little rotation like maybe nearly 10°
2nd thing I’m was going with full default pids so mot_thst_hover and mot_spin_min i forgetting but now I’m going to manual process like you given XML file
3rd battery monitor always going crazy i don’t know why everytime calibrate with toolkit RC M8 or M6 charger during ESC mode or pwr mode but always my power module don’t work properly
I want to excited to show my dream frame , not be 100% but it’s just like this
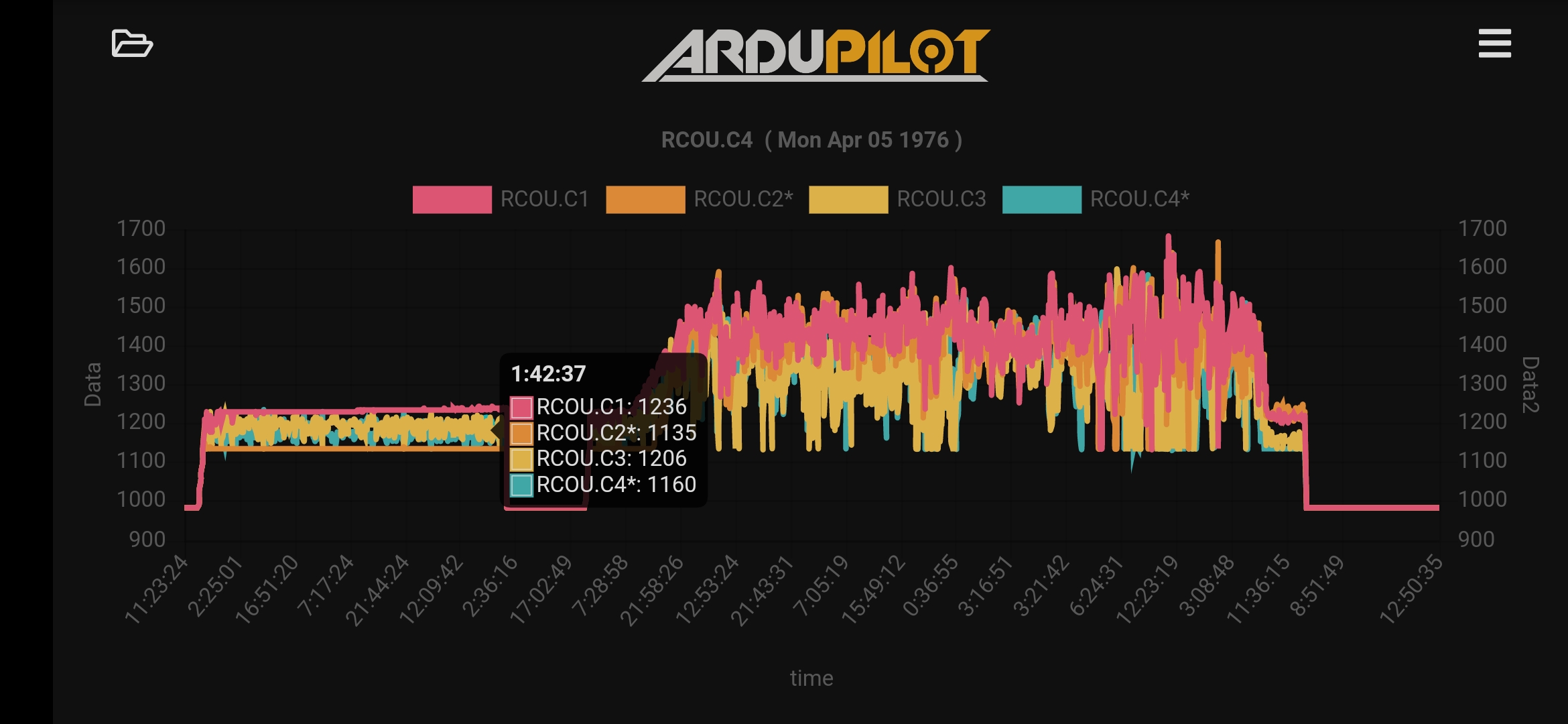
Also I have f450 during morning and there is motor 3 are look like lost power when I’m getting jump throttle 0 to 50% + then motor 3 are not going faster then others also after the test little warm .Bin file
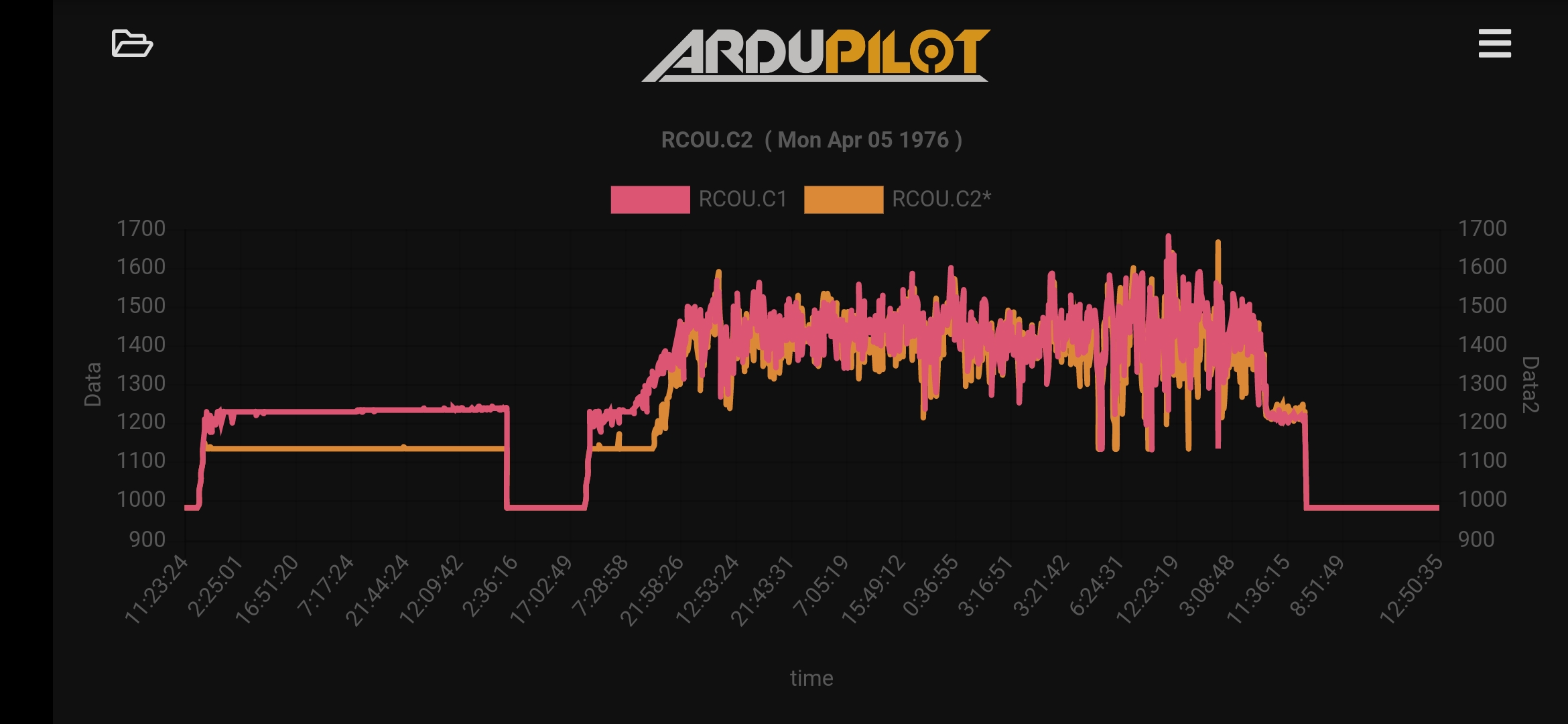
Sir @xfacta what is a meaning of this linear line ? As compared to other motor output
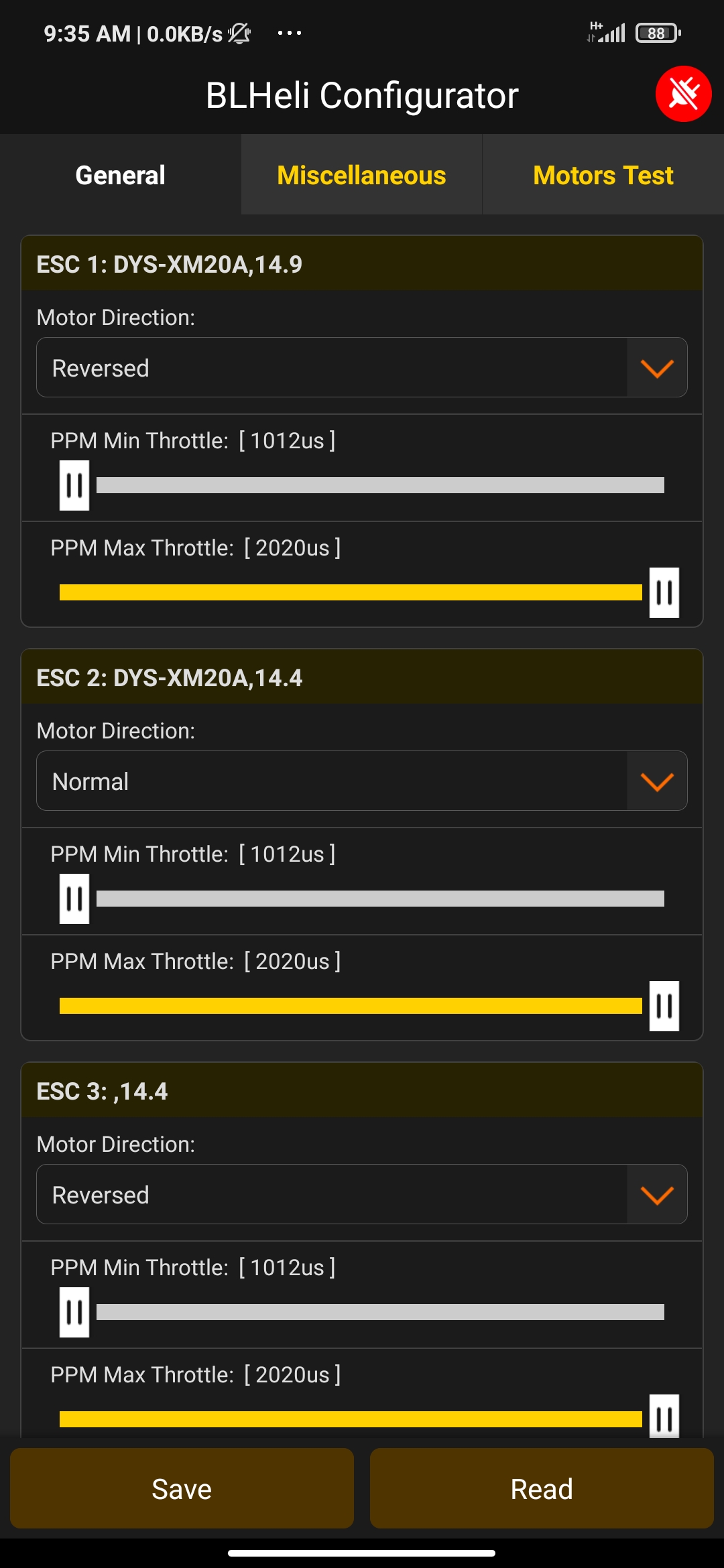
My ESC are calibrated , last time motor 4 esc i was change but is not closed calibrate , and always my rc 3 out is 980 to 1900us and 1 ,2 , 4 are 1000 to 2000us
And what about warm problem ?
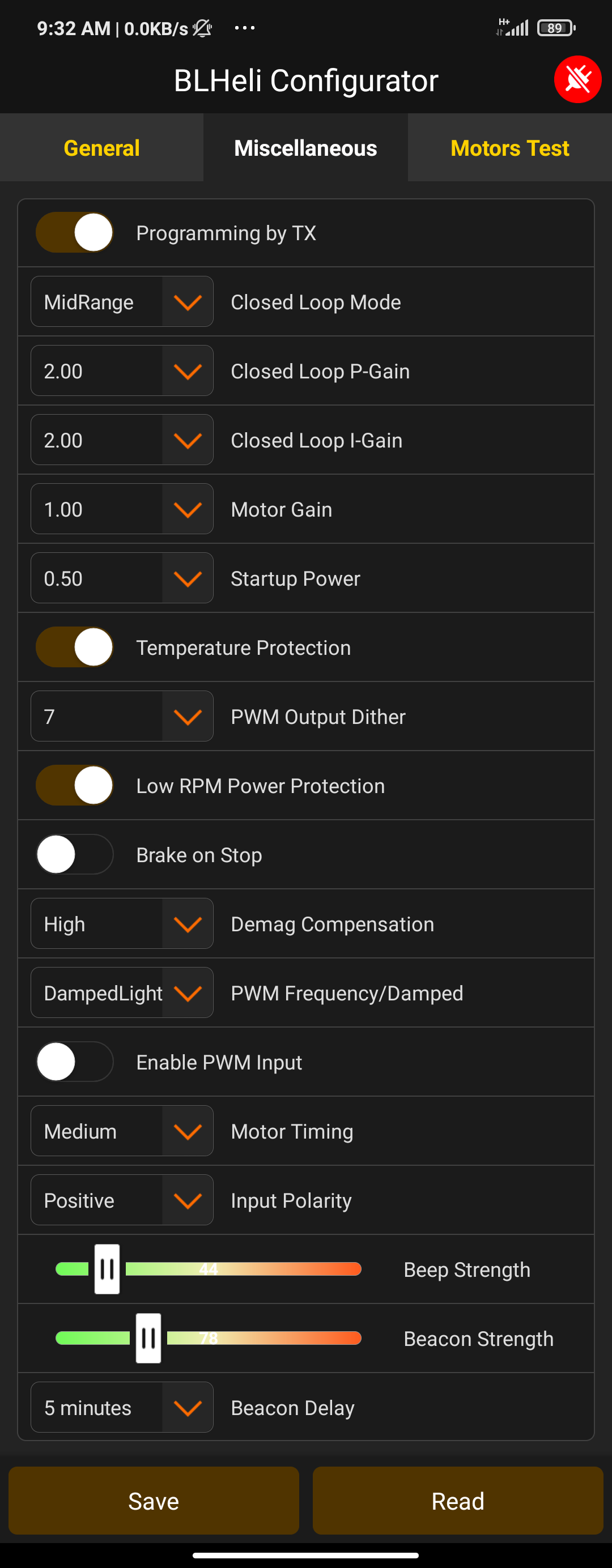
Also there is so major difference on demag compensation and motor timing are different so I will flash and try it again , what do you think it’s possible ???
Set all the same (all defaults) and disable Low RPM Power Protect.
Also disable Low voltage protect, but ensure the Arducopter voltage readings are correct and failsafes are set.
 , not be 100% but it’s just like this
, not be 100% but it’s just like this