Gday, folks! Does anybody know how to set up horizontal and vertical offset of camera’s sensor center to a GPS reciever (mine gps reciever location is 315 mm back and 10 mm higher than camera’s sensor center). Thank you in advance.
First hit on google for “arduilot GPS position offset” 
http://ardupilot.org/copter/docs/common-sensor-offset-compensation.html
I’ve read that manual, but offset is setting up regarding the IMU position, but camera has different position
There is an Ardupilot PR for that, but usualy that is done in post processing.
Just use this http://ardupilot.org/copter/docs/parameters.html#gps-pos1-x-antenna-x-position-offset
It isn’t going to make much of a difference to the IMU, like the beginning of the link above. But it will help you zero in on your camera position for mapping/modeling which I assume is the reason your looking for this. make sure you measure to the sensor plane not just the center of the lens. Also remember if your on a gimbal your likely going to move off axis from the center of the sensor plane for the came when it tilts depending on your gimbal.
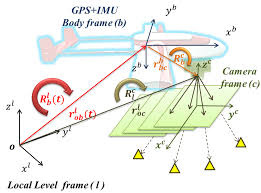
What you are looking for is called lever arm
Google “lever arm uav” you will find a ton of study like this one :