If there are two motors then from a control point of view, I think the best place is on each side, somewhere between the middle of the boat and the very back of the boat. If you imagine an line between the two motors, that line should pass through the center of rotation of the boat… which might be very close to (or the same as) the center of gravity of the boat.

Randy - like this you mean ?
Pete ! - these version 7 prototypes - we are not too far away from “final” version - they are performing spectacularly well
Look for “Buoybots” !!
1 Like
Yes, that position looks ideal to me. Looking good!
2 Likes
Well done @AndrewRW 
Can’t wait for my stuff to turn up now 
Really great videos and looks like the buoys are working really well!
thanks Randy - very grateful to you !
Question. For lowest total cost, maximum simplicity, and minimum of gear, we are using Radiomaster TX/RX (T8 Pro version) so we have a one TX to many RX model. What we seek is an Open TX developer/programmer who can take on the task of minimising the options on the screen, giving the user the ability only to change between models, and not inadvertantly edit/copy/move the config around like i did in may first few hours ! Ive put a request on FB Radiomaster and Open TX forums but nil interest thus far. Any clues ?
A logical next step is version with wifi in the rover and manage all Buoybots on a screen - but i sense that’s a much higher price point - and complexity i cant get my head around yet !
Would be grateful for any tips, or point me resources please.
Many thanks again.
Hey @David_Boulanger I note you are running a 3S 11.1 volt lipo.
I’m new at this so am not sure what volt battery to get. My thrusters have turned up and they say 12 - 24 volt (these thrusters on ebay
Can you recommend what voltage battery would work best?
N
I think it would depend on the KV rating of the motor and what kind of load you are putting under
309 / 5000
Hello Andrew
I remind you so that you communicate to me the material that you used, because there is a wide choice to install Ardupilot and I would not want to buy material not compatible with your solution. We use Open TX with one transmitter and several receivers currently for buoys.
Thank you
Christian
Hi Folks,
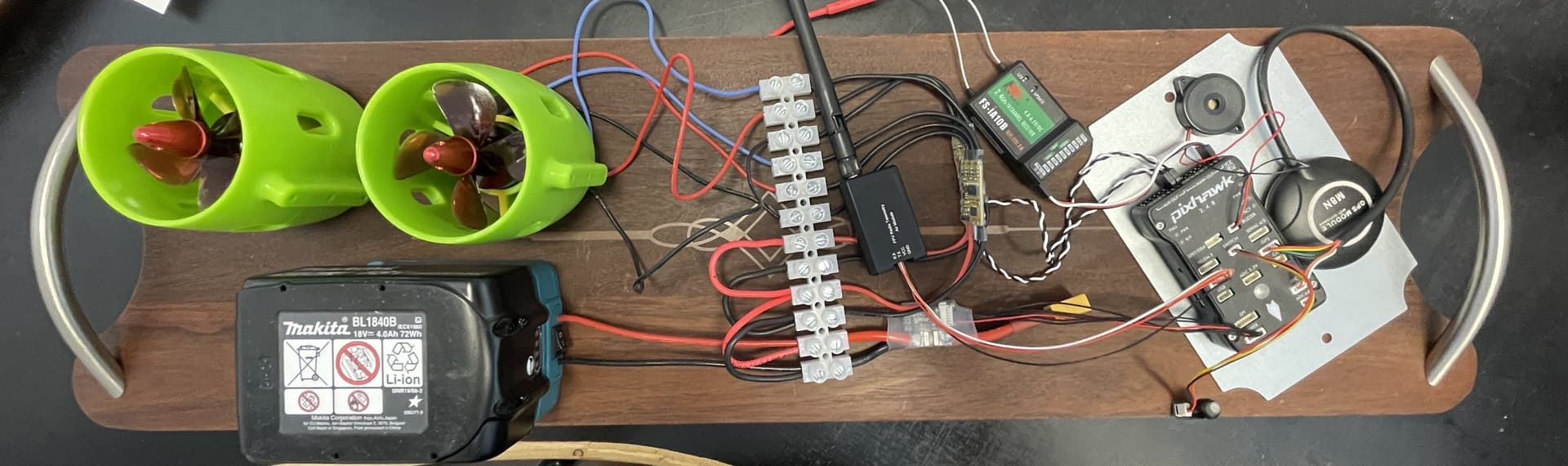
quick pic of where I’m up to. This is all the control bits (sitting on a cheese board). I’ve solved the battery issue by simply using my Makita battery with an adapter. Works a charm.
Hours and hours of working out which firmware version and which params to set but she’s finally running.
QQ though - I’ve set it up as a Skid Steer rover. But as far as I can tell ardurover has no support for a reverse. Can anyone confirm this or let me know otherwise please?
I’m happy to continue on - these things will sit for hours pointing into the wind so it’s no biggie.
1 Like
hello,
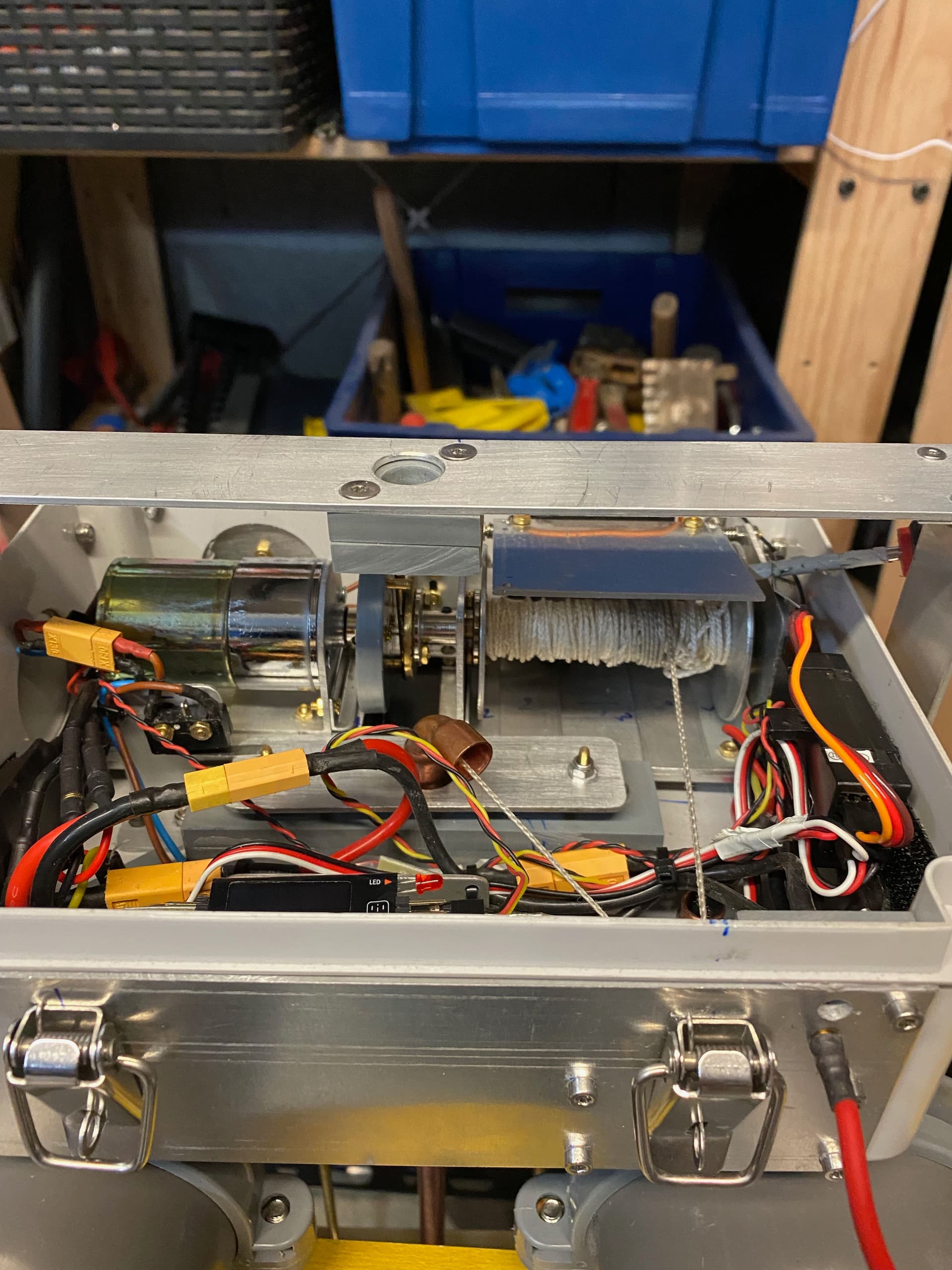
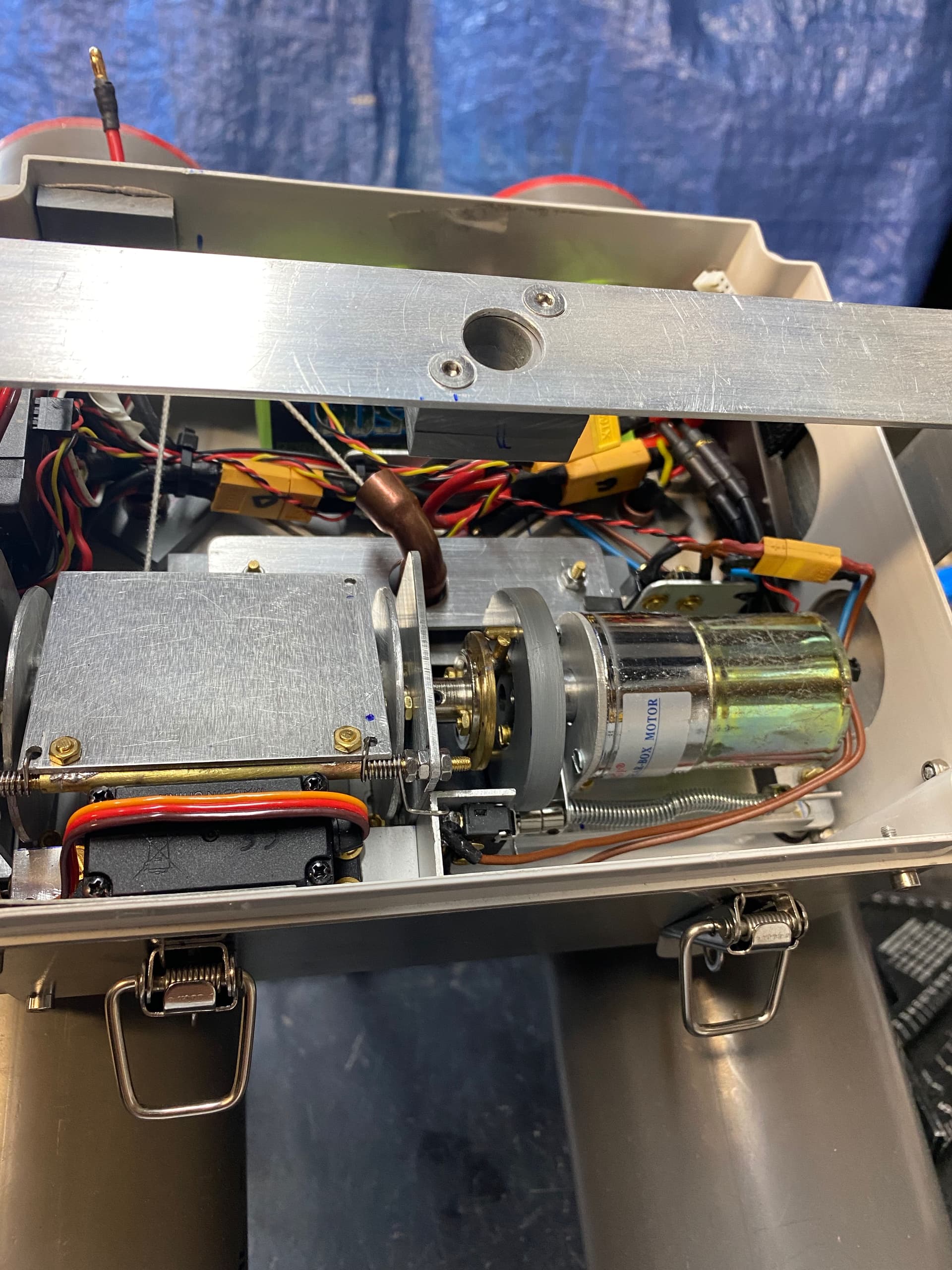
We are an RC sailing club in France near Limoges and we have RC buoys with winch and ballast that I want to transform into a self-holding position.
I installed Ardupilot Rover on a Matek F405-SE card with M8Q-5883 GPS, I am new to this material and I need your experience to integrate the specific code for loiter on Rover 4.2
Thank you

ChristianBatoire,
Is there a place to find out more about what you currently use? It intrigues me.
Thanks
Interesting anchoring mechanism ![]()
Before going for the code I would test all the hardware with a regular RC setup and a vtailmixer or a RC mix to provide differential steering, make sure the hardware is ok as well as battery capacity etc…
Then it is a matter of loading either a boat or rover firmware and see for yourself with trial and error in order to adapt to the vehicle.
Regards
Mat
How are the rovmaker 2216 thrusters holding up. I’m building a couple more for my club and trying to decide if I want to continue with the T 200’s or try something new. The T 200’s have the advantage of obtaining parts easily if needed but are expensive.
Hi David, the 2216 performing very well. Only issues we have had relate to QA checks at manufacturer, which they rectified without delay, one had carbon instead of stainless screws, one motor set up to operate in opposite direction that that ordered etc … they are much smaller than T200 … but more than adequate for our needs
O.K… Thank you for the fast response
Has any one seen this? Seems like the early start to a project
I also am interested in a anchorless bouy course but I want to use it for motorized surf boards,… (Jetsurf.com)
Also MarkSetBot
Marksetbot is larger scale making them for large sail boats … Pricing - MarkSetBot
Please @ mention me is there will be a kit available for say 10/15 bouys …
Thanks,
Ryan
I had the same problem for a long time. Maybe to late for you, but this is what helped me:
https://ardupilot.org/copter/docs/common-blheli32-passthru.html#blheli32-reversible-dshot
Hello AndrewRW,
I am also enthusiastic about building a similar buoy myself. I’ll usе it for laser dinghy races. My question is what hardware and software should I choose to implement the project. Usually up to six buoys are used, including the start buoy. If you could specify precisely the necessary hardware and software that I need to assemble, I would be very grateful.
My email is valentin.obreshkov@gmail.com
I would like to say my congratulations to this topic and all of its contributors.
Best regards
Valentin