For my ESC (different from your) I used BLHeliSuite16714902 from here to flash 16.73. I you haven’t already tried.
It works also with wine on linux.
Thanks for the tip. I have that version and I think I did try it. But I’ll check again. Luckily on this craft I can easily disconnect the servo leads from the Flight Controller and reconnect to the old Naze32 board I use for this purpose. But I did order new BLHeli_32 ESC’s anyway.
@andyp1per is ‘small-copter-4.2’ the right branch to test your latest release with bidir dshot?
Er, highly experimental at this stage as it includes the UART fix. I suggest you stick with pr-bidir-dshot branch unless you are feeling lucky. I hopefully will fly the small-copter-4.2 branch tomorrow.
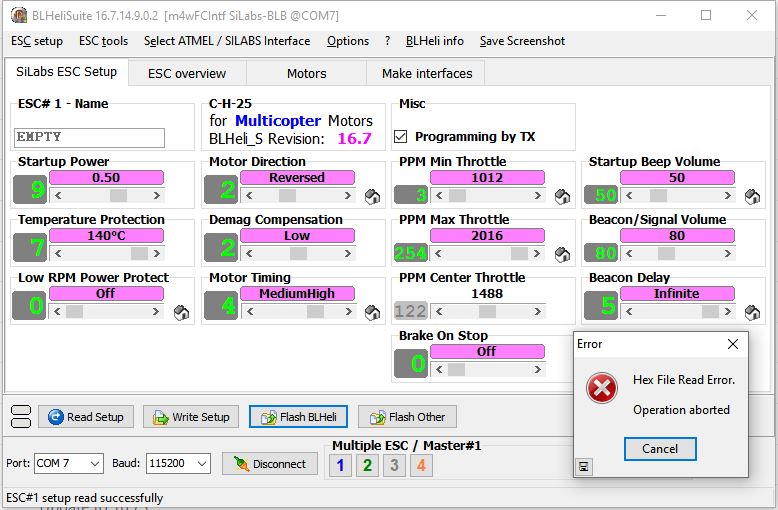
Maybe the hex file is corrupted? Try to download it again.
Still errors out. Maybe just that one file (C-H-25).
Strange. You can try 16.77 from here just to see if it is a problem with that file.
Same problem which doesn’t seem right. A favor, could you please download and attached the C_H_25REV16_73.Hex file here?
Here it is the hex zipped
C_H_25_REV16_73.HEX.zip (6.6 KB)
Well thanks Andrea that did the trick! They flashed, the motors run in Motor Test (Dshot300) and there is ESC RPM data in the Motor Test log. The values look funny but at least I can advance. Too bad it’s now snowing here.
I Really appreciate the help!
Edit: RPM data is fine with a test Motor run from the Transmitter.
1 Like
I’m glad it works.

I have bought a Beast H7 AIO and the 16.73 loads on that - so looks like I will be supporting BLHeli_S  - need to port the boardfirst though.
- need to port the boardfirst though.
@dkemxr when downloading HEX files from github you need to select the raw version first and then do save as.
Yes, this was my problem.
That AIO board is quite the package.
Dave, I rebuilt my Pixracer 4" now with BLHeli32 - there were some issues with DMA sharing in the previous config which I have fixed and posted a new version of the firmware. Please let me know how it goes.
Note that in my testing I am still getting some motor heat - so be careful. This may just be the fact that I changed the motors and the PIDs are wrong.
EDIT: so I think this may be down to CPU load. Running with a notch-per-motor (INS_HNTCH_OPTS=2) clearly increases the CPU load and this board has multiple IMUs so increasing it further. I switched off FFT and that seemed to cure it - so just beware.
Hi Andy-My 5" Pixracer is down for some work but I thought it would be interesting to try this on a larger quad (13"), Pixracer also, that was using FFT referenced notch. Updated those BLHeli_S’s to the Jmav firmware also. It’s on the bench at the moment waiting for it to warm up outside but I see what you mean about CPU load ~60%. I disabled FFT. I was using both Double Notch and Dynamic Harmonic before so disabled Double Notch. Is this the right approach?
Note: This is a really a test craft so if things go sideways it’s not a big deal 
I would start with
INS_HNTCH_OPTS=0
Check that you are getting rpm output roughly equivalent to the FFT and then switch off the FFT and use
INS_HNTCH_MODE=3
If that works ok then try
INS_HNTCH_OPTS=2
Alternatively disable the second and third IMUs
OK, will do. RPM in the log from a no prop bench test looks OK.
Does the Dshot protocol really matter here? After flashing the jMav firmware I was playing around with Dhsot150 and 300 and both spun the motors (not tested in flight). There can’t be any advantage to Dshot300 on such a large craft with low kV motors.
1 Like
What it buys you is less monopoly of the DMA channels - but since we aren’t sharing its a moot point
It uses this https://firmware.ardupilot.org/Copter/latest/mRoPixracerPro/ different from the older Pixracer.