Epilogue
Thanks to those in this thread, and others in my numerous specific query threads, I now have two TRex 500 helis flying in Stabilised, Position Hold, and RTL modes with Arducopter. Just in case any other newbie to Aurducopter helis reads this, here are some of my observations:
My first TRex 500 is actually an HK500 metal frame, with all moving parts replaced with Align gear, plus a Tarot FBL head to convert it from flybarred. Following advice here I used an mRo R15 controller and, apart from its size, it was a plug-in replacement for the BeastX that I had been using. Because of the size I had to mount it sideways on the frame with 2mm 3M tape instead of horizontally between the frames on the tail drive gearbox. I used a piece of carbon tube, bolted to the side of the frame by longer bolts replacing the tail drive gearbox ones, as a mast for my GPS unit. Once I’d got the hang of programming Ardupilot I was impressed by its flight performance – nobody at our field has seen a heli performing automatic landings before!
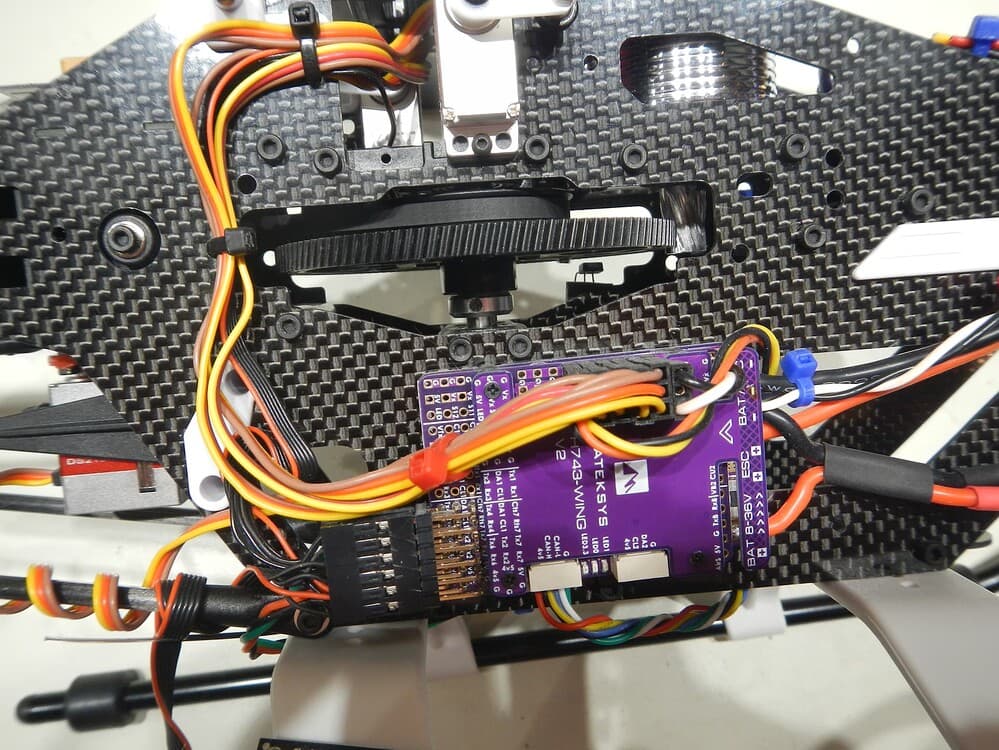
My second TRex 500 is a genuine Align one, with carbon frame and tail boom, and a 4-blade head for use in a scale fuselage. For this one I decided to go with a Matek H743MINI board, partly because it’s much cheaper than the mRo R15, and partly because the R15 isn’t available at the moment. Installation was much more involved than with the R15 because the Matek’s PWM 1-4 signal outputs are from a mini 8-pin plug which also includes the Vcc + and GND inputs, and PWM 5-8 are on regular pins on another edge of the board. My solution was to make a separate ‘break out board’ to gather the needed 6 PWM output into one pin header, and to separate the servos’ and ESC’s signal leads from their 3-strand cables to connect to this header. The Matek board is powered direct from the 6S motor battery, so the red and black wires from the servos were connected to another ‘break out board’ supplying 5v from the ESC’s BEC backed up (isolated by diodes) by another stand-alone BEC. Once I’d got all that sorted, my first test flight showed that vibration was way over limit, so I replaced the 3M 2mm tape in this model with Kyosho 5mm gel type tape. That got the vibration back within limits, but it became unstuck as I was preparing for my second flight. Not trusting the Kyosho tape for side mounting, I realised the Matek unit in the housing I’d made was narrow enough to fit between the frames on top of the tail drive gearbox, so that’s where it’s now located. Hanging the GPS unit off the side of the frame wouldn’t have fitted inside my scale Hughes 500 fuselage, so I made a ‘bridge’ of fibreglass plate, which straddles the tail drive gearbox using its fixing bolts, and places the GPS unit centrally over the geargbox. This version has now flown successfully in my usual three modes.
Vibration was not an issue with my original heli with the R15 controller, so why it is with my Matek one is a mystery to me. Could it be the R15 is electronically damped (or something) whereas the Matek isn’t; or is it the frames’ materials (metal vs. carbon), or is it simply something out of balance in the rotating parts even though I’ve balanced everything I can?
Thank you to those who helped, and thank you for reading.