I have used pixhawk 2.8, V.4.4 and tuning has never been a problem for me. Now I made a 4.4Kg hexsacoper (tarot frame) and things are not going smoothly, to run (flight missions, atlholt shakes…maybe this is a PID tunning problem. using the default Autotune.
my problem is as follows.
When in Loiter mode the drone still experiences violent shaking. Likewise, using the ALTHOLT model the drone will continue to advance at a speed of approximately 2m/s without any pilot control.
and when carrying out a flight mission via the route that has been created, the drone suddenly drops alt 4m after passing a turn at the waypoint and is about to head to the next waypoint, the drone actually experiences a decrease in alt to 1-2m, even though in the mission settings it remains 4m for all waypoints,
so I’m afraid if this drone carries out a flight mission over plants.
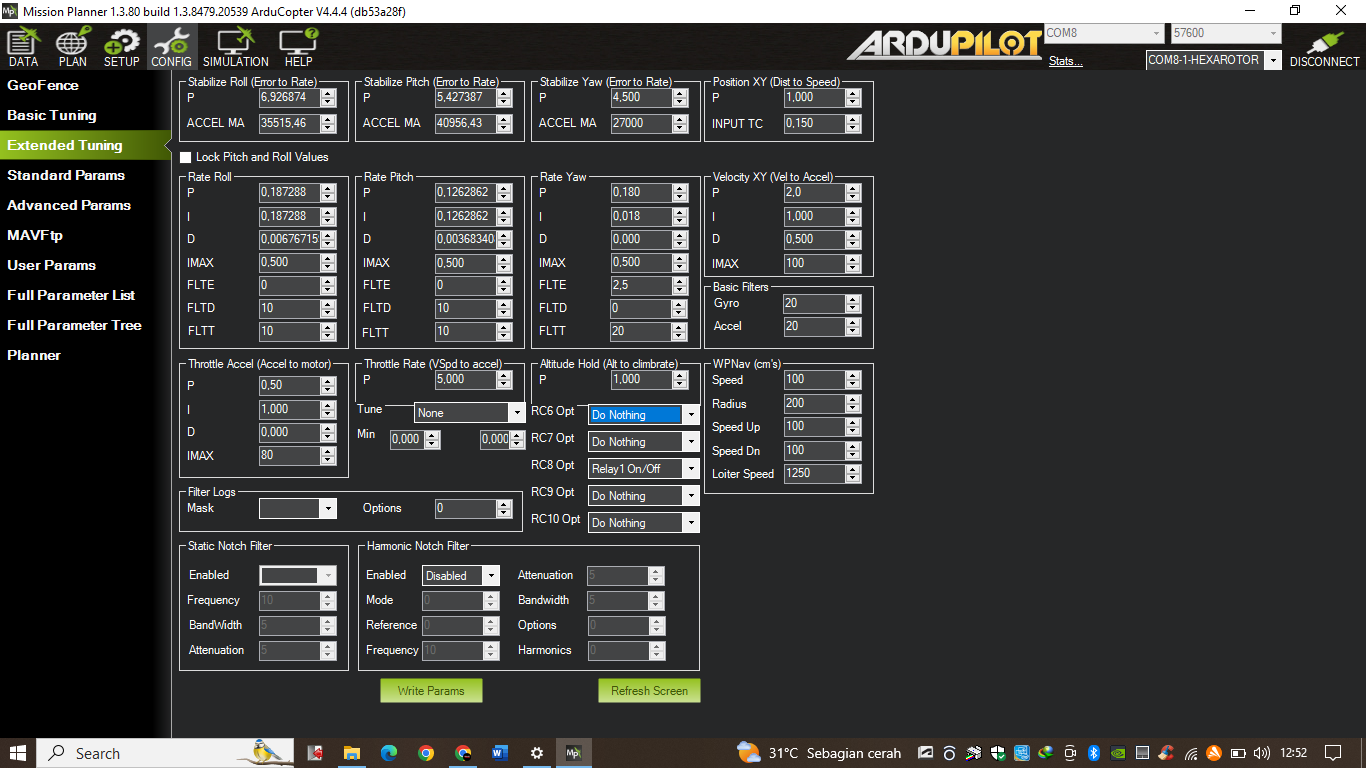
This is the best PID I have managed so far, using automatic mode or AUTOTUNE.
Post a .bin log file so we can see what’s going on.
In the meantime I recommend to read the How to methodically tune (almost) any multicopter using ArduCopter 4.4.x guide and to redo all the steps you have been missing so far. Download the .zip folder with the param files from the guide, edit each file to suit your copter and upload them one by one as you read along. The guide tells you what to do and which file is needed at any given time. Do not skip any steps! Anything that might seem like a shortcut will result in a worse tuned copter in the end.
You can (and probably should) update to 4.4.4, but you don’t need to reset everything. When you update through Mission Planner all the parameters will still be there.