Hello,
I have also encountered glitches with two copters (Pixhawk 2.4.8, Arducopter 4.0.3) which crashed afterwards.
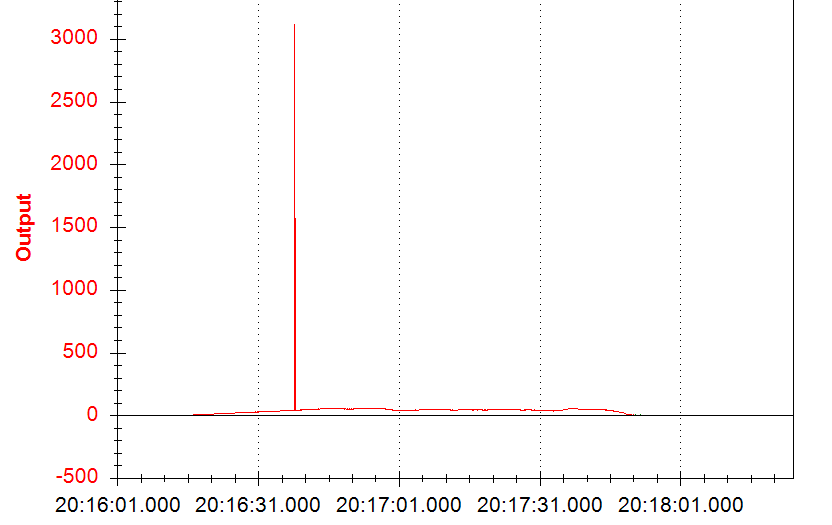
Could someone have a look at my log please? That would help me very much.
Thx, Tobias