@pilotltd, I had a look at the baro data just now, it does move around by about 3m which is a bit more than I’d expect but they do drift a fair bit. It’s a bit interesting but for now at least I don’t think it’s related to the inability to arm.
I ended up reloading the firmware and trying to re-calibrate again. Cannot get the compasses correct. All that was connected was external gps. Both GPS and Pixhawk are physically aligned and was positioned pointing to magnetic north. Can you have a look at the following please. As yet I’ve had no further response from hex.aero regarding the bad compass and baro problems.
Thanks
I had the same problem.
Check your GPS satellite links. It should be more than 10+ in order to disappear BAD AHRS + make sure GPS cable not close to other signals and power lines.
For compass: Try to calibrate in default or relax mode ( make sure GPS/compass is far from power lines at least 10cm+. Ones calibrated check if it showing right direction and calibrate again instrict mode if you want better direction.( i use strict mode and never had any issues)
Dear Randy Hello
i have this problem too
The GPS green line is frozen but still getting the alarm of UNHEALTHY AHRS
What do you recommend me please?
I’m having the same problem on a new build. I had ARMING_CHECKS = 0 while I was doing all the bench setup and I was continually getting Bad AHRS messages over and over. So after calibrating my accelerometer and compass, I set ARMING_CHECKS = 1 and this message pretty much went away. I’m getting different messages now specifically
PreArm: AHRS: EKF3 Yaw inconsistent (by various amounts).
PreArm: AHRS: EKF3 Core 1 unhealthy
This is turning on and off, so I could probably arm if I just wait for it go go away, and do it quickly before it comes back again.
@timtuxworth please open a new thread.
The “Bad AHRS” message appears when the EKF doesn’t have a good position estimate. It is not a very useful message so I think we will eventually remote this message to be consistent with Copter which doesn’t display this message.
The ARMING_CHECKs parameter value doesn’t affect whether the message will appear or not. I suspect if the vehicle is armed in a mode that requires a position estimate (like Auto, Guided, RTL, Loiter), an EKF failsafe will be triggered soon afterwards and it will switch to Hold mode.
In any case, I think once the calibrations are all done and the vehicle is taken outside it will start working correctly.
1 Like
You said you were going to remove the message back in December 2019 ![]()
1 Like
Unhealthy AHRS still causing problems after latest update!! Not been used due to this ongoing problem. It’s calibrated and has a 3D GPS fix.
Same on Plane latest version. Been asking for help but no response except enable compass which I do not want to do. I’ve never had this issue with fixed wing before.
This has been an ongoing problem for years that has NOT been resolved. In my case it’s whining about GPS, I don’t care whether I have a GPS fix or not - the damned annoying message obliterates the screen. I have resorted to all checks off to enable arming as it seems overly sensitive on how many satellites constitutes a fix, only 4 is required not 10+ as Ardupilot seems to want!! Not that I always need a fix, it’s a rover that is often used in indoor environments and has lidar and cameras to navigate via operator, GPS is nice but not a show stopper. It should simply be possible to disable the annoying and distracting message.
What you view as a nuisance is a feature to many other users (and it’s not the same issue as the OP is having). If you are using your Rover indoors, take a look at @rmackay9’s demo of GPS to non-GPS navigation transitions:
GPS / Non-GPS Transitions — Rover documentation (ardupilot.org)
For those of you with AHRS unhealthy messages during compass-less operation, have a look at your EK3 parameters, particularly the yaw source.
1 Like
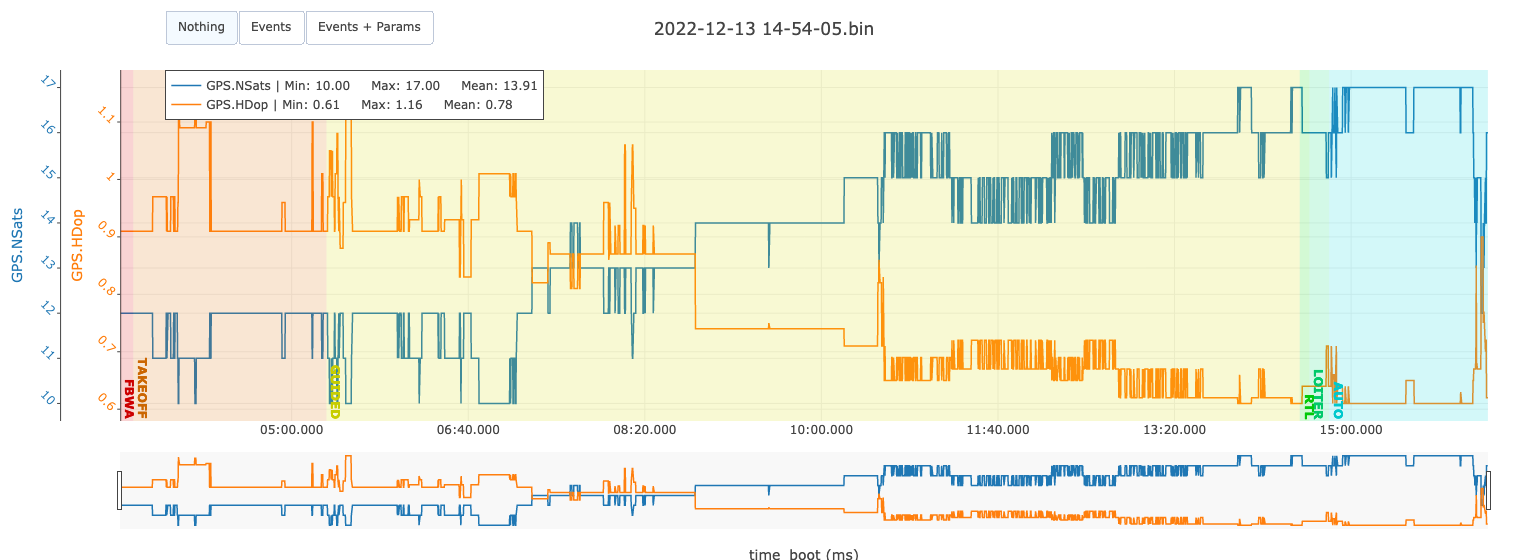
Not to hijack your thread but for plane I am able to arm and takeoff, just that the HUD warning message never goes away. As you can see I have good sats and hdop.
Interesting. I never changed these parameters but a lot of my builds stem from previous “known good” configurations.
Would it be recommended to set all vertical sources to barometer and horizontal to GPS?
| EK3_SRC1_POSXY | 0 |
|---|---|
| EK3_SRC1_POSZ | 3 |
| EK3_SRC1_VELXY | 0 |
| EK3_SRC1_VELZ | 0 |
| EK3_SRC1_YAW | 0 |
| EK3_SRC2_POSXY | 0 |
| EK3_SRC2_POSZ | 1 |
| EK3_SRC2_VELXY | 0 |
| EK3_SRC2_VELZ | 0 |
| EK3_SRC2_YAW | 0 |
| EK3_SRC3_POSXY | 0 |
| EK3_SRC3_POSZ | 1 |
| EK3_SRC3_VELXY | 0 |
| EK3_SRC3_VELZ | 0 |
| EK3_SRC3_YAW | 0 |
OK, sorry about this ongoing annoyance. I’ll do my best to remove the “Bad AHRS” for Rover-4.4 which will start beta testing in about a month.
1 Like
@rmackay9 Thanks. Although I believe my issue with plane is due to some EK3_SRC parameters not being set correctly. I am flying without compass so I think I need to change some to GPS. That sound about right?
Fairly straight forward isn’t it?
Setup¶
Simply, set COMPASS_ENABLE = 0. Fallback to the GSF will be automatic if normal default values are being used for EKF parameters.
For configure EKF3 to always use GSF set EK3_SRC1_YAW = 8 (GSF).
1 Like
Yeah, I think my parameters must be old carryovers. I will compare the default values.
If you’ve been carrying parameters forward since ~4.0, the EK3 parameters would almost certainly be at defaults, since EKF 2 was the only Kalmann filter available at the time.
I have been carrying over for a long time. If I recall, I may have started with a dev version so it’s quite old. I will have a look at the default params and compare to mine to sort this. I had no idea that my EK3 parameters may not have been default as I never changed them. I will look back at my backups and see where it happened just for sanity. Thanks!