How dual(blended GPS) work? How does it collecting data? Any resources or doc for detail understanding?
The very first post of this thread is the best and most detailed documentation in existence.
If you want more details you will need to read the source code.
1 Like
Hi @Bhanupratap,
Welcome to AP. Here’s a link to the wiki docs on GPS blending.
@rmackay…
I have already gone through this AP doc. I am looking infor more than this. Can you suggest or send me if any material available?
Can you send me the link of source code and from where to where I need to read it?
The GPS blending code can be found here. Licensed under GPLv3 as is the rest of AP.
Ok thanks @rmackay.
I have one more question that what is Mavlink command for verticle speed?
I’m not sure if you’re hoping to get the vehicle’s current “vertical speed” or if you’d like to specify the target speed. In any case, we have some information on the MAVLink interface here which is useful for specifying the target vertical speed. If you’re looking for the current speed there are a number of messages but I’d probably recommend looking at the GLOBAL_POSITION_INT message.
I am looking for verticle speed. I have connected RPI to cube orange. I am getting all data same on my screen which is on MP except verticle speed. I tried GLOBAL_POSITION_INT but still verticle speed speed is not matching with MP display value.
Basically, i am looking for current verticle speed.
Ok, you might try VFR_HUD’s climb rate field.
Already tried this but still getting different value
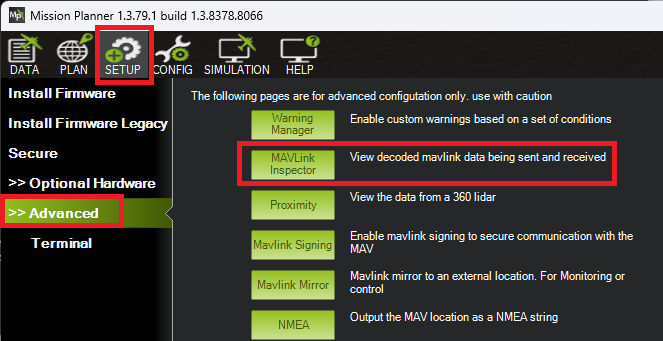
Maybe use Mission Planner’s Setup >> Advanced >> MAVLink Inspector to search through the various messages sent from the vehicle to the GCS.
Hello everyone,
I have a question regarding the GPS Blend option. I’ve connected two GPS modules to a single CAN port on Cube orange plus, and I’m wondering if enabling the blend option can increase the GPS accuracy. In the logs, I can see the HAcc (horizontal accuracy) value for both GPS modules separately, but I’m curious if there’s a way to view the blended HAcc value. I’m interested in learning more about this. Can anyone provide insights or guidance on how to access the blended HAcc value?
Any help or information would be greatly appreciated. Thank you in advance!
Hi @Samarth_Patil,
I think the blended GPS will appear as GPS3 in the logs (e.g. instance 2).
2 Likes
Hi @rmackay9 , thank you for the reply. I am analyzing the logs on UAV Log Viewer, where I’m not able to see the 2nd instance. However, I checked on Mission Planner’s Log Viewer, and now I’m able to get the 2nd instance for GPS blend. Thank you for your response!
1 Like
Hii,
I am using 2 here3+ Gps with cube orange plus, currently i am blending them.
I just want to ask if somehow one of my GPS turn’s off due to any problem, does the drone will continue to fly or got crash or am i going to face any other type of problem.
The drone will continue to fly. That is the purpose of blending, increase accuracy while retaining reliability
3 Likes
Hi,
I use blended GPSs on my VTOL - the two GPS are Matek/uBlox MAX-M10S (primary) and SAM-M10Q (secondary). Looking at the logs, the blend seems to work very well, however the POS value does not seem to be following the blend - it is not even between the 2 GPSs! How can I correct this so that POS is making good utilisation of the improved accuracy from GPS blending?

Hi @LzREngineering,
It’s probably better to post in the Plane support forum but the most common reason that POS (which comes from the EKF) may not be between the GPSs is if the GPSx_POS_XYZ parameter have been set.
Less common reasons include other sensors affecting the position estimate (e.g. high vibration, maybe airspeed sensor?).
Hope that helps.
2 Likes