Does anyone know what kind of configuration would be best suited for merging the Pozyx indoor positioning system with a Here GPS on the same aircraft?
Would Dual GPS or Blend be the best bet?
What triggers Ardupilot to switch GPS priority?
Hi,
I am using 2 Ublox NEO - M8N with Pixhawk 2.1
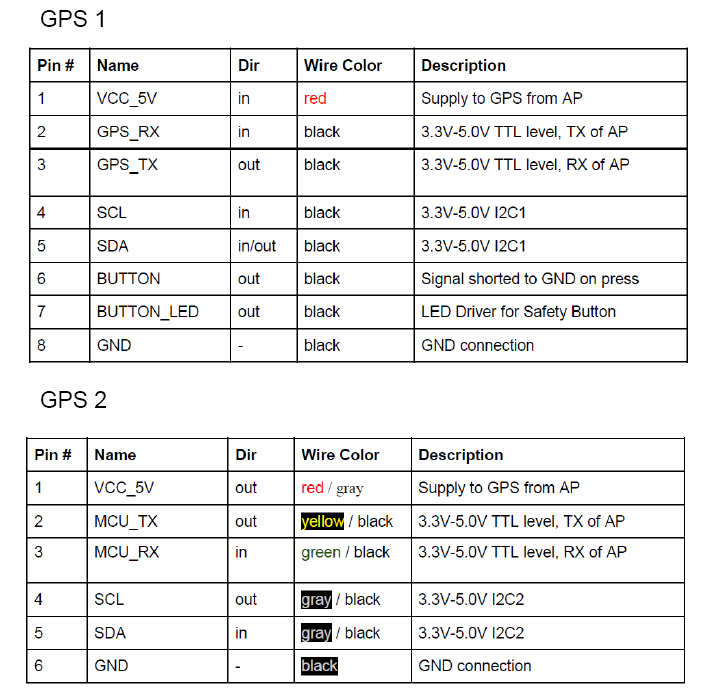
These 2 GPS are plug into GPS 1 & GPS 2 ports respectively.
I have set the following parameters
- GPS_TYPE to 1: Auto
- GPS_TYPE2 to 1: Auto
- SERIAL4_PROTOCOL = 5 / “GPS”.
-GPS_AUTO_SWITCH = 2 / “Blend”.
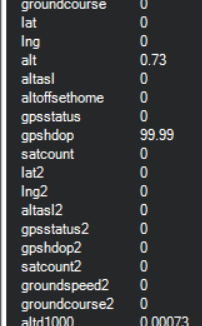
but the Flight Data screen are shown as below
Did you reboot after configuring the system ?
The GPS is a GPS, the pozyx is a beacon.
They can not be blended out-of-the-box.
But my guess is that the EKF will do that for you, albeit not the blending that you are after.
What do you mean by reboot. ? Power cycle. ?
yes. I meant power-cycle.
Hi,
Amil
Yes. i did power cycle. but both GPS 1 & 2 are not being detected.
@rmackay9 please help. thank you
Hi there,
I also have been toying with the idea for the merge you are outlining.
Have you been able to find out anything else, or maybe even had a chance to test yet?
Would be great to hear some more about what works, or where the roadblocks are.
Hi, I haven’t been able to test it yet… but will be working on this very
soon. I just got two of the marvelmind indoor navigation systems
https://marvelmind.com/shop/starter-set-hw-v4-9-plastic-housing/ and will
be configuring a rover, and then copter to use this indoor system. Once
that is reliable I will then be working to setup that system on a drone so
that it can go from indoors to outdoors smoothly without any issues.
Like I said, I just received these units and haven’t even started playing
with them. Let me know if this sounds like something similar to what you
want, and how you are thinking of going about it.
Regards,
Zevi
When using marvelmind, please apply the ardupilot PR I did to improve It’s precision.
Hi Zevi,
thanks for the pointer. I had a look at their offering and really like their approach of streaming NMEA-formatted data. The limiting factor for me here is the indoor limitation and the limited reach of the sensors.
I also envision a seamless fusion, an EKF blending of “fake-GPS” (coming from beacons) and “real” GPS.
I have not quite thought this all through, but at first glance I should think for this to work - for going from “inside” to “outside” - the beacon position (network) would need to be precisely calibrated. So basically one would need to establish the GPS coordinates of a secondary positioning network (which is setup in a GPS-denied environment).
But maybe there’s a smarter way to keep positioning absolutely accurate and repeatable - in both environments?
Would be great to keep up the discussion to find a real-world solution.
I’ve just started to use dual gps on Ardurover 3.2.0 and wanted to review the paths as shown in your post. I don’t seem to be able to find the ‘show map’ button you mention? I’ve even tried the beta mission planner but still can’t find out how to display the information as you have. I’d really appreciate a pointer in the right direction!
Thanks
Hi Russ,
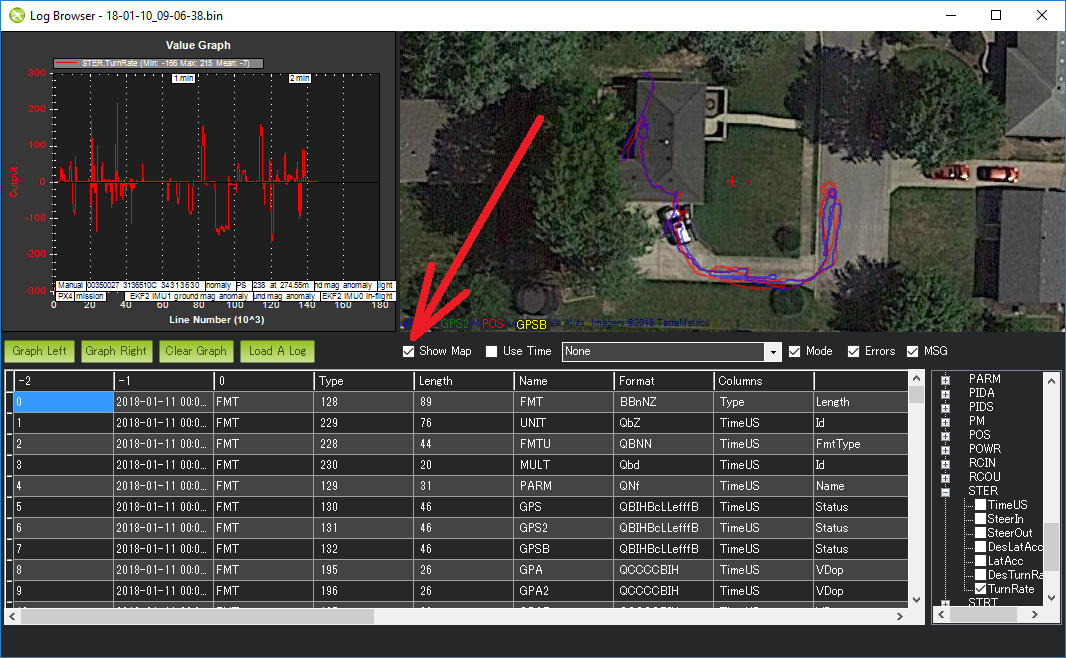
The “Show Map” button is on the MP’s dataflash log viewer (Logs Wiki). So if you open a .bin log file from MP’s Flight Data, Data Flash Logs tab (see bottom left), then select Review Log and select the .bin file a window like below will appear with the “Show Map” check box on it.
Hi rmackay9
Thanks! I missed that, my mistake; I was looking at telemetry logs! I look forward to checking out my logs and seeing the different gps tracks.
Really appreciated, cheers.
Hi olliw42
since I’m facing the same problem trying to connect a second GPS, i.e. " … the MissionPlanner HUD displayed a 3D-Fix at the moment the 2nd gps went good, even though the main gps still showed a hdop of 99.99!" and since I also desire " … the data of the 2nd gps to be logged and thus can be analyzed.", please tell me have you done any progress on that?
ioanxeno@gmail.com
Ioannis
Hi there,
I’ve been testing GPS blending and it works like a charm, but when reviewing the flight log I don’t find any GPSB category as mentioned in the documentation:
Am I missing something?
Log: 2019-07-29 11-21-14.bin - Google Drive
Thank you.
2 Likes
Could you say if I should put the two gps modules as close as possible each-other (to optimize coordinates blending) or keep a distance between them… (EMI…) ?
