Unfortunately Missionplanner does not show airspeed values (SDP33) with AP_Periph 1.2 from CAN-Bus.
With AP_Periph 1.0 on a F103 it worked with ARSPD_TYPE 8 and ARSPD_PRIMARY 0.
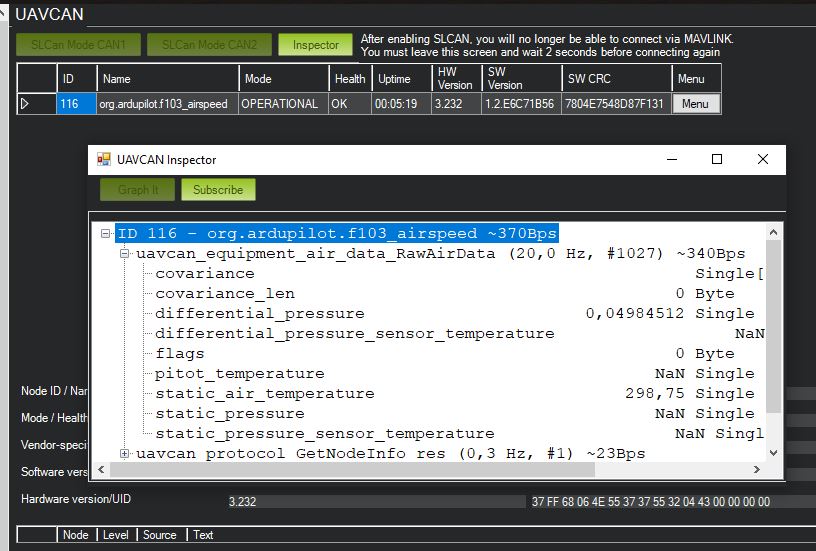
However, the UAV_CAN Inspector clearly shows differential pressure values.
The same problem exists on the F303-Matek on the M8Q-CAN and M9N-CAN where GPS, Baro and Compass datas are displayed in the Missionplanner in contrast to airspeed. Airspeed values however are also displayed in UAVCAN Inspector.
Both on a Pixhawk 1 and a Matek H743 with current stable fimrware.
SUPPLEMENT:
The airspeed is also not displayed at OSD ( neither OSD1_ASPEED, OSD1_ASPD1 nor OSD1_ASPD2).
Rolf