I read that “Complementary PWM acts as a brake to decelerate the motor more quickly when the throttle is lowered. This is crucial for the responsiveness of FPV drones as it helps change motor RPM more quickly. Enable this for better flight performance.”
When the motor stopped it majorly collapsed my folding prop.
So I just went outside and arm it and they all started fine but motor 3 just stopped spinning after about 4 seconds no noise or anything.
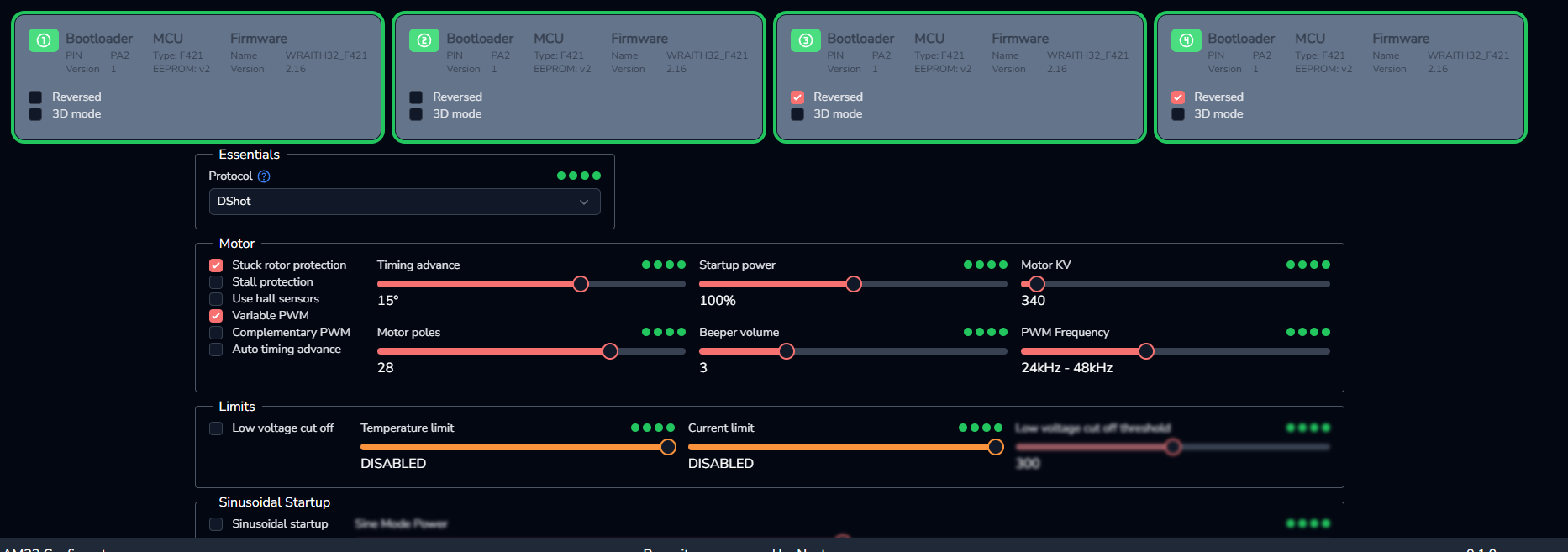
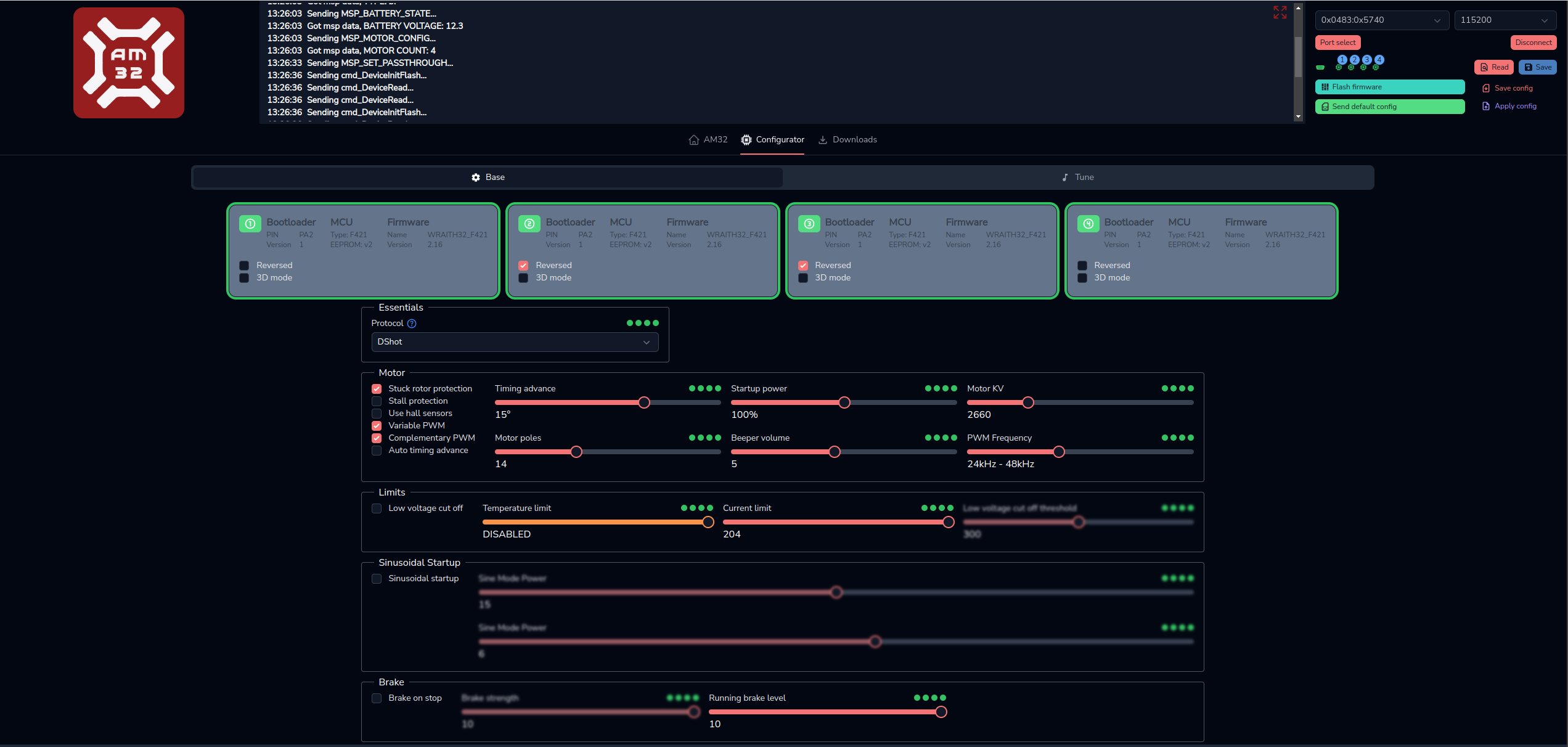
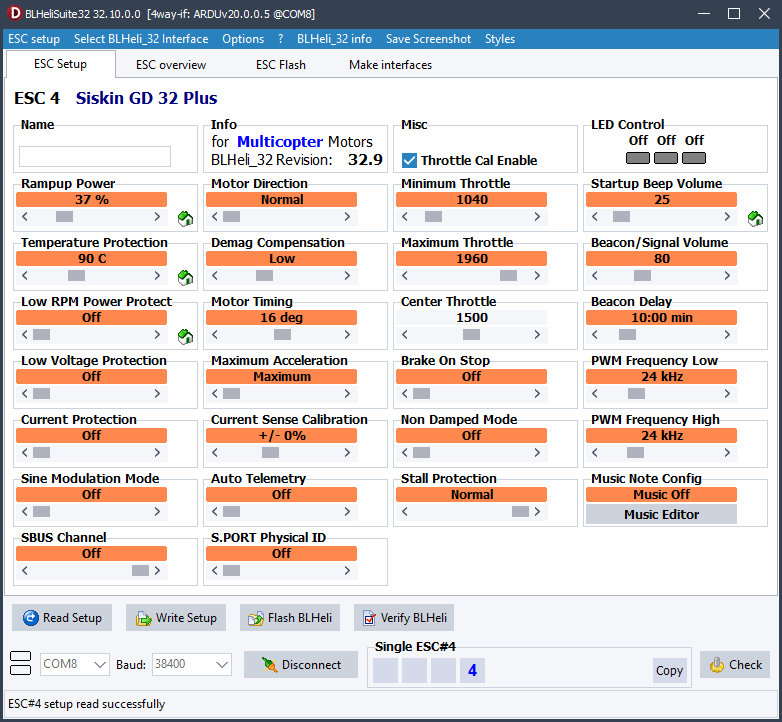
Here is my esc config…
In general the Variable PWM feature does change the pwm frequency in some relation to the motor rpm. BL_HELI32 does not have it, so if it ran with BL_HELI32, it is likely due to that.
As tor the Voltage, I checked the ARWingPro with Arduplane 4.5.7 and it also reports the wrong Voltage via MSP, so 1.6 must be 16.X Volts, maybe a bug in Ardupilots implementation of MSP.
The Tyrant S with Betaflight sends correct Voltage for a 3S.
I don’t fully understand all the specs on esc and the in and outs but maybe…
If my esc is " * F4 MCU with AM32 firmware Dshot1200 up to 32kHz" and the variable pwm is setup for 24-48kHz but my esc is only up to 32kHz, then would that cause desync because it is sending the signal faster?
I also am assuming that it is compatible with DSHOT1200 and 600, 300 etc right? I am currently using DShot 600.
I might not have made sense as to what I am saying.
Here are the esc’s that I am using.
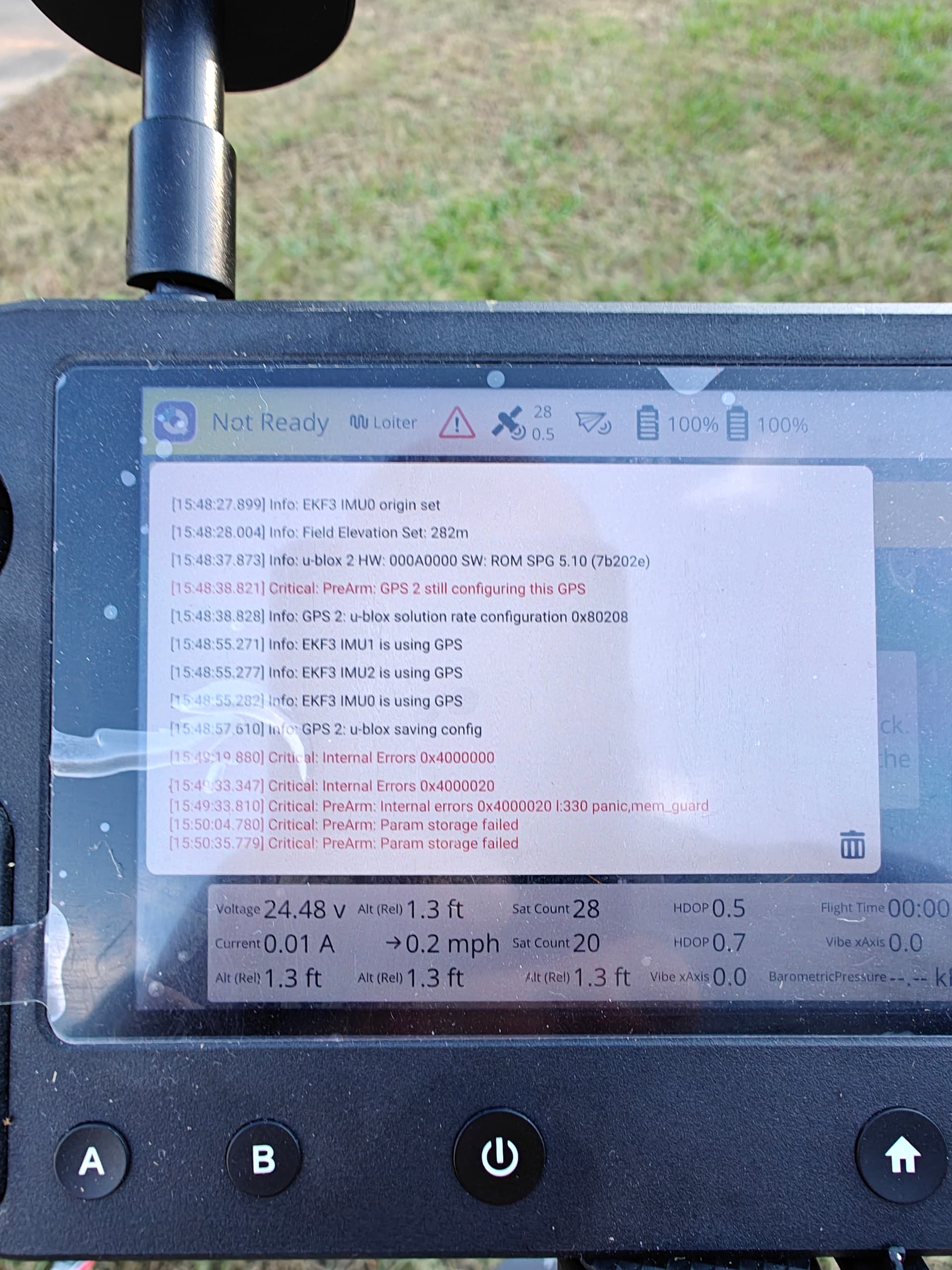
I armed without variable PWM and still had the same issues, when the motors stopped spinning this is the error I received. I have no clue what this means.
That is exactly the ESC that I have. I have no clue how to control the LEDs. Must be something MSP or Betaflight specific.
The errors you’re getting are identical to what I got with a Holybro Kakute F4 V2.4 while trying to get Copter working. The Matek H743SlimV3 did not show this behaviour. I assume it does indicate that you over-stretched the resources of your FC.
Try DSHOT300 instead. I assume you have a F405 based FC.
If the ESC recognizes issues on the FC control signal it will disarm and that’s what likely happens with the motor that just stops.