Sorry for late reply,for last few months i was busy with some other things i didn’t have chance to fly much
As per your instructions i managed complete autotune and everything went very well except tuning Yaw angle P,for some reasons it fails soon as i flip autotune switch but heli still flys fine with stock value.
Noticed that i get oscillation in fast forward flights,and in the log i can see that DesPitch and Pitch not tracking very well,any idea what would be the problem.
Another question would be how to increase response of the tail,at the moment i get one 360 degree turn in approximately 2 seconds https://drive.google.com/file/d/1iJLcDv4c8UkneCqYQNzPfnwolmbEDSjY/view?usp=sharing
@ivank Hi Ivan,
Sorry i didn’t look at this sooner. Looks like the yaw axis is a little oscillatory. Looks like it might be too much Rate D gain. If you have the log for Rate P and Rate D tuning for the yaw axis, I would like to see it.
Looking at the log, you are getting most of what you request but there are instances that the actual is not matching the target.
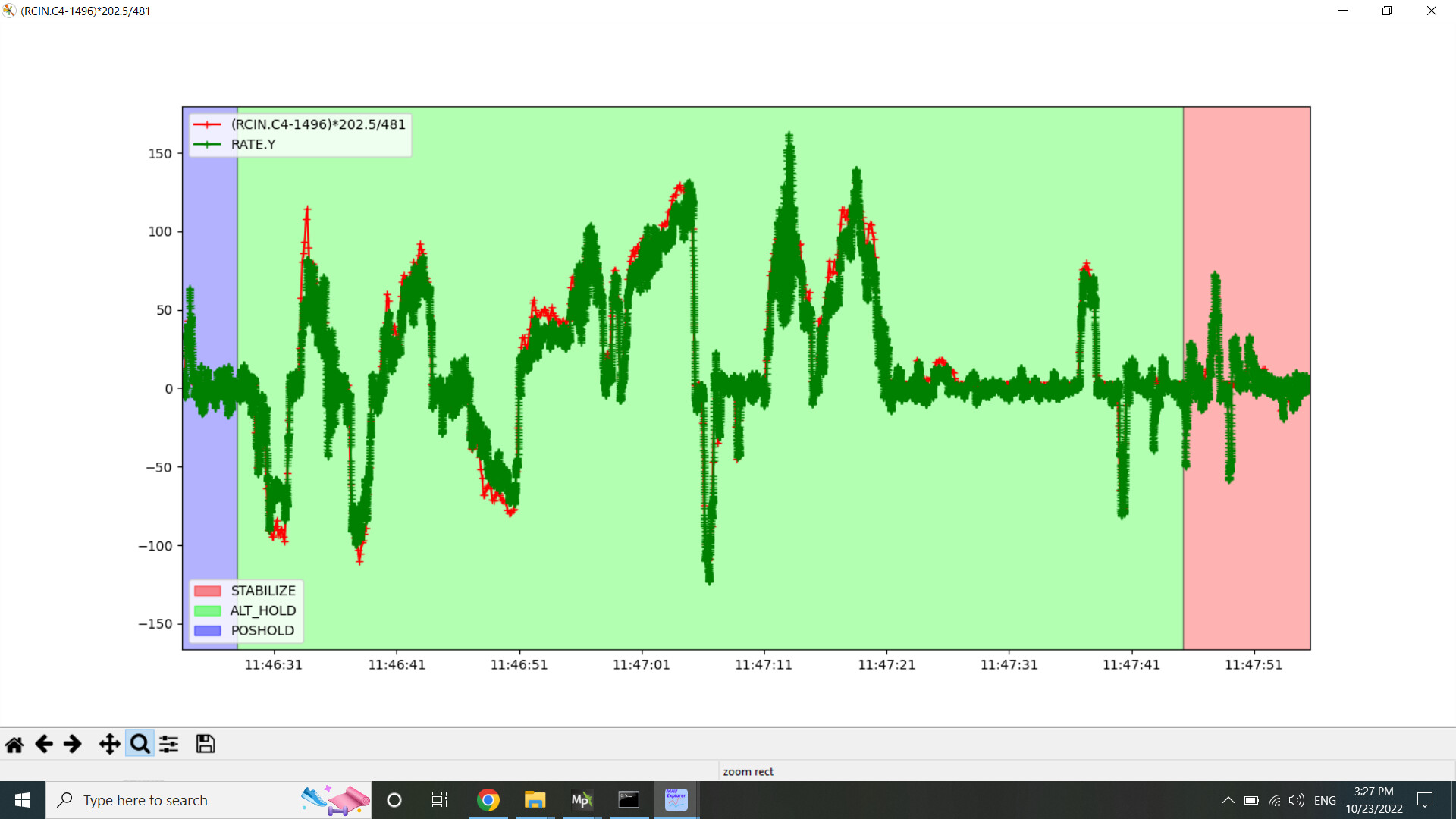
This shows your requested yaw rate from the RC stick. So if you want more rate out of the aircraft you can increase PILOT_Y_RATE. currently your max requested rate is 202.5 deg/s. From looking at RATE.YOut, it looks like you have more command available to get higher requested rates.
@ivank The log ending in 104 was the tuning for the pitch axis. The log ending in 107 was the yaw tuning of angle P. Please provide a link to the yaw tuning of rate P and rate D.
@ivank Yeah that might be the issue. I didn’t see anything like that in your tuning logs. That Angle P tuning for the yaw axis decreased from the starting frequency and thus determined the lowest frequency as the max gain frequency. When it started the dwells, it goes below and above the max gain frequency that it determines from the sweep and when it tried to go below the max gain frequency, it was out of the frequency range that was set by AUTOTUNE_FRQ_MIN. I would suggest setting the ATC_ANG_YAW_P to 6 and try the yaw tuning again.
Sorry I didn’t answer this question earlier. I saw that the autotune must have ended up on ATC_ANG_PIT_P at 3. That seems low. Try setting the angle p to 6 and run the angle P autotest but you can stop it right after it completes the sweep. Post the log so I can look.
@ivank The first log (122) was a rate p and rate d tune of the yaw axis. I actually wanted you to perform the angle P tune on the yaw axis. Sorry if I wasn’t clear in my previous post.
The second log (123) was the angle p tune for the pitch axis. I looked back at a log (103) where you did angle p for pitch and roll. On that log it chose the wrong frequency to tune angle P for the pitch axis. Based on that log, I was able to see the response with pitch angle P of 4.5. It was still a little high but I think you should set it to 4.5. That would help it hold pitch better. Then reduce ATC_RAT_PIT_FF to 0.15. That will help to reduce the response gain a little more so there is less overshoot.
After few weeks of bad weather today i tried tune yaw angle P and it ended with message “failing to level, please tune manually” not sure what is going on there.
Your suggestion of 4.5 for pitch angle P works great,heli is flying nicely.
On the second flight i tried to set Imax,as per wiki with imax set at 1 was doing fast forward flight and i can see that max I value is -0.18 so i should set Imax at 0.28?
Thanks again for your help