Well, I didn’t give up and tried other different things but unfortunately I was not able to use on-board IMU.
Workaround for me is use of “external” IMU" - I’ve used module from an older gimbal with MPU6050 and I’ve connected it via I2C interface.
This is my current placement of external IMU:

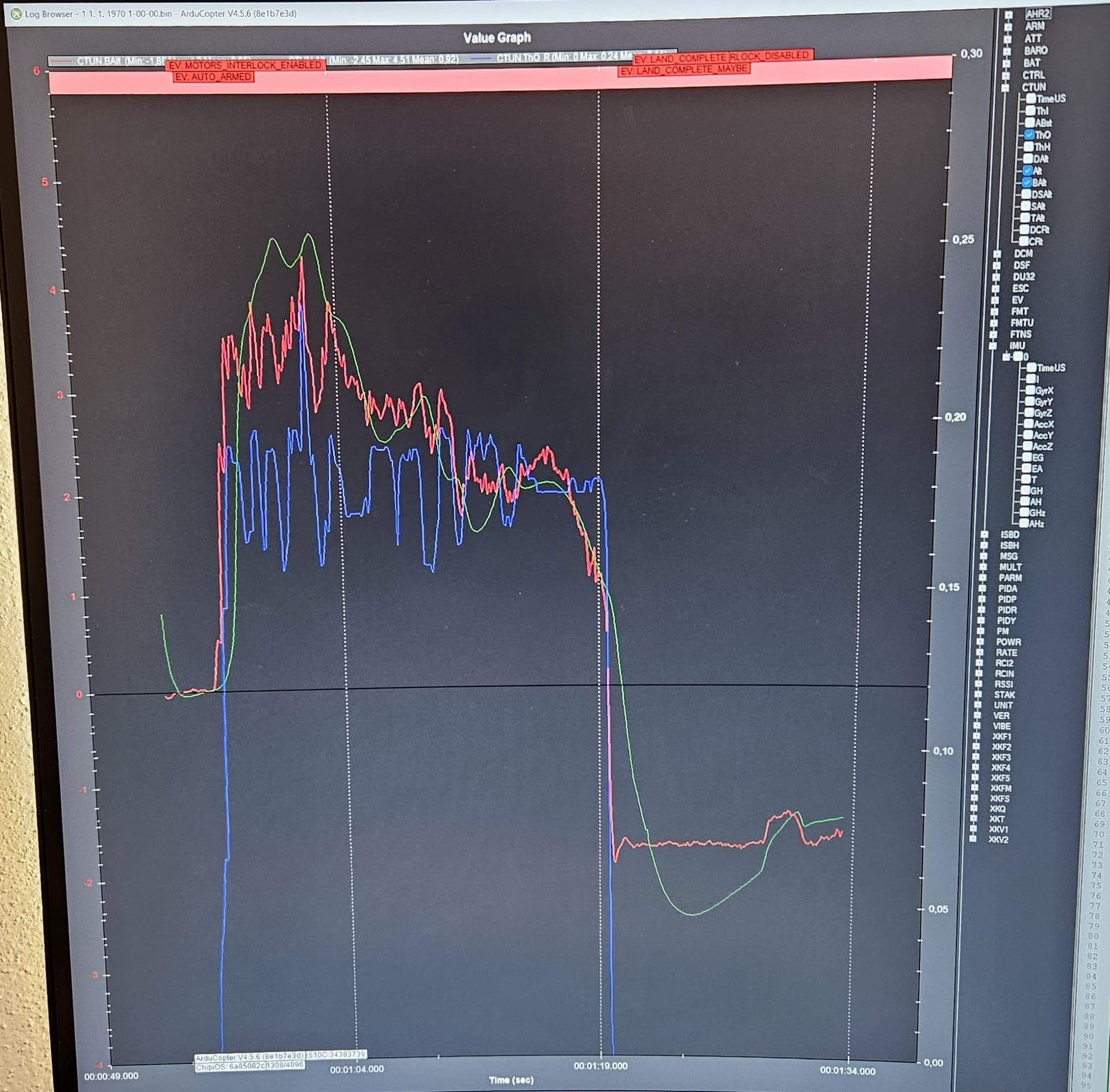
And finally the estimated altitude is tracking barometric altitude:
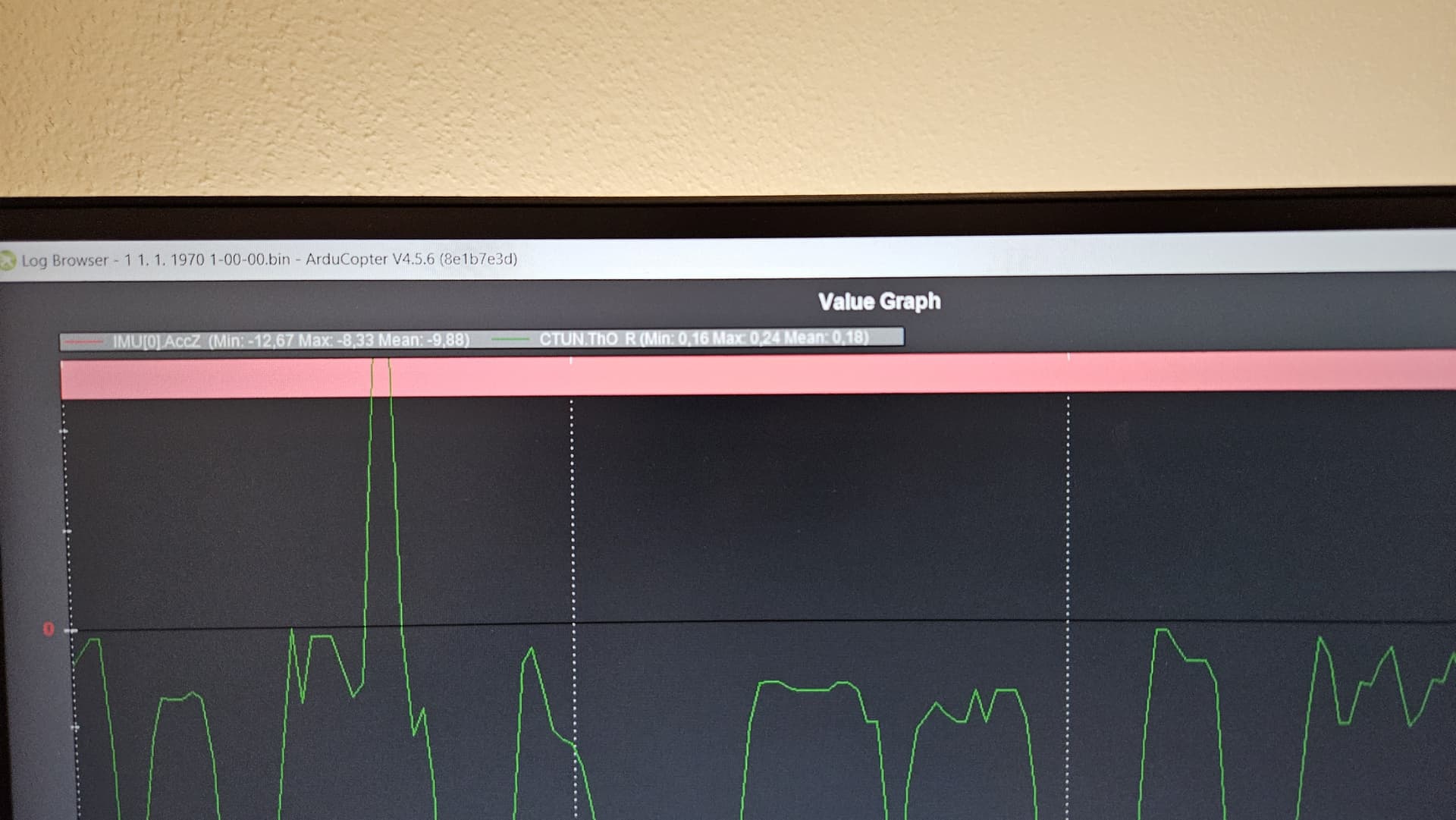
Also the average value of ACCZ is close to expected 9.81 m/s2:
Short video of final setup when hovering in Loiter mode in moderate wind:

Updated Copter-4.5.6 code if anyone will try to run Ardupilot on Pavo20 Pro quad with F4 2-3S 20A AIO FC V1 Commits · mariansoban/ardupilot · GitHub . Only thing I would do different way would be use of I2C1 instead of I2C2/USART3 like I did because of a bit tricky soldering and necessity to disable internal ELRS receiver. Pads for I2C1 are populated on board, but not documented on FC page F4 2-3S 20A AIO FC V1 – BETAFPV Hobby. I’ve used SDA of I2C1 for switching of LED strip, that was connected to TX of USART6 before.
Thanks to everybody who tried to help me!