Hello,
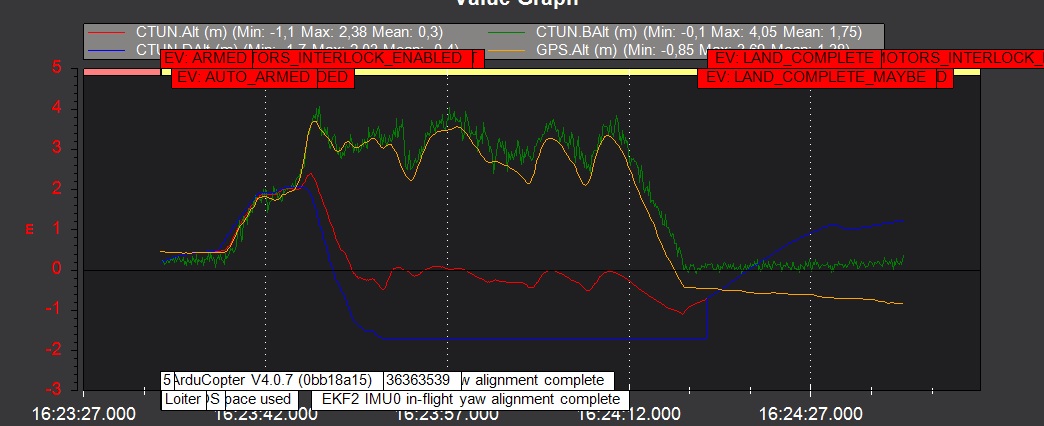
I have an altitude problem on a drone with version 4.0.7; pixhawk 4 holybro , with wind influence the drone climbs in altitude , in the logs the baro altitude is not too bad but the altitude calculated by EKF goes down and goes wrong, I show you the log ,stationary flight
,
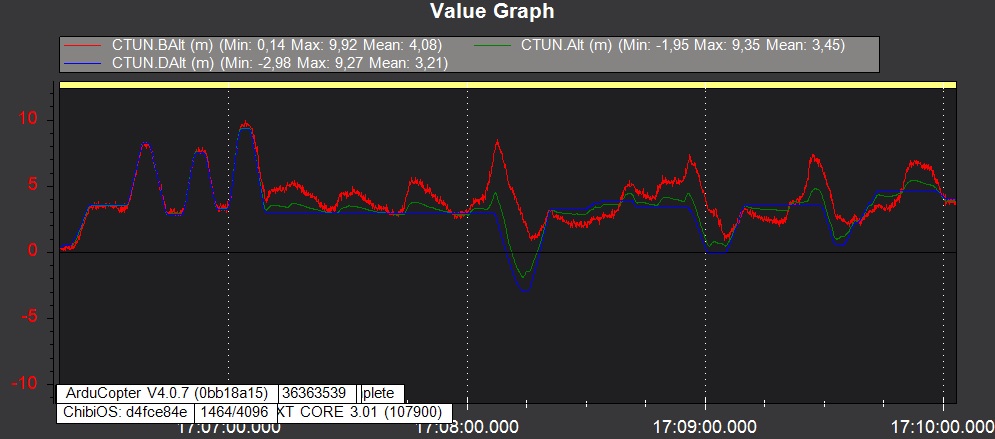
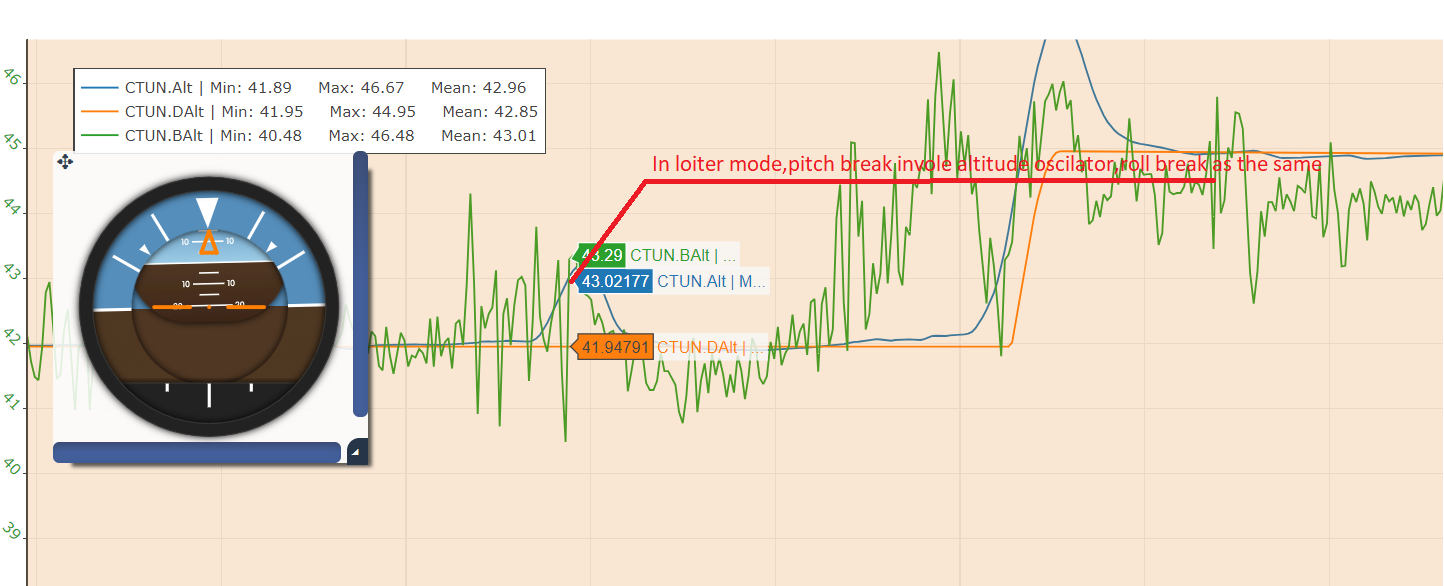
I suspected IMU cause, I redid the accelerometer calibration and i did a second flight, no wind, at the beginning it was stable in altitude but when I accelerate in x,y position in loiter mode, the drone has to climbs in altitude
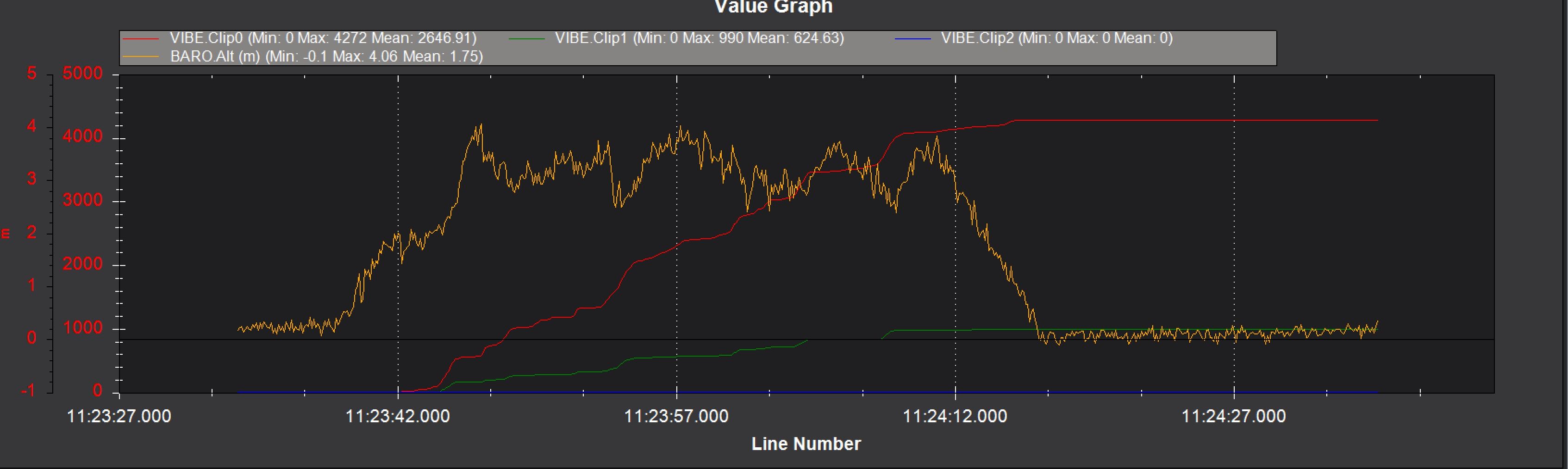
I just added the log of second flight ,the vibration here is not bad , but when the drone move quickly , he goes up , i always suspect the effect of the wind. but is wierd I didn’t have this problem before with other drones , i use for the first time X500 holybro frame ,esc and motor , i have a second x500 frame with same configuration he fly better .
Hello all, I am having some quite large alt variations on my X8 copter. The cause is well known ie aerodynamic pressure bubbles as it speeds up/slows down. Would increasing EK3_ALT_M_NSE be a good way to mitigate this somewhat?