according to the wiki, if you disable arm/disarm on rudder, then airmode is enabled. I have my arm/disarm moved to a switch. so I thought it would be enabled. my atc_thr_mix_man value was at 1. should I bump that up to 2 or even 2.5?
what I want is “air mode” or the ability to be able to have control over the quad while inverted and throttle momentarily dropped to zero. on the wiki, there is no mention of needing to use motor interlock to achieve this. however, I believe this may just do what I want. I am going to try it today but I am a bit confused on how exactly to implement it. I have read in comments in here that you need to enable it on an RCx_OPTION. so that would give me the ability to turn motors on/off on a switch. do I need to use that in conjunction with an arm/disarm switch?
1 Like
I keep arm on my transmitter sticks.
So, I arm w/ the throttle/yaw stick. Then it’s armed but motors not spinning. Then I flip the switch I have assigned to motor interlock, which does use an RC channel. Then motors spin up, and will keep spinning until I flip the interlock switch again.
You do still need to arm, one way or another. The interlock does not arm as well as lock/unlock the motors.
1 Like
Leonard flys with it set to 2 - so that sounds like a good thing to check. But be careful, this will mean you get aggressive control when doing gentle maneuvers like landing, which I think is why it’s good to have arming on a switch
1 Like
ok I understand now. I am going to try raising atc_thr_mix_man to 2 and see if that gives me what im looking for, if not, I will move my arm/disarm back over to throttle/yaw and setup motor interlock on a switch (RC channel). I will report back in a few hrs my results. thank you!
1 Like
I think interlock on a switch accomplishes the same thing, though.. You can cut power to the motors at touchdown or just above ground.
2 Likes
switch or stick, either way it acts as a sort of dual-stage arming similar to having a pre-arm setup. but unlike a pre-arm, you also get a dual-stage disarm. I wish there could be a slightly better implementation of airmode in Arducopter but if this works, ill be happy
1 Like
Can you point me at the part of the wiki you are referring to? I don’t think you need all these arming options, it just means you need to be more careful at takeoff and landing. Also make sure you have a really good tune before bumping MIX_MAN.
1 Like
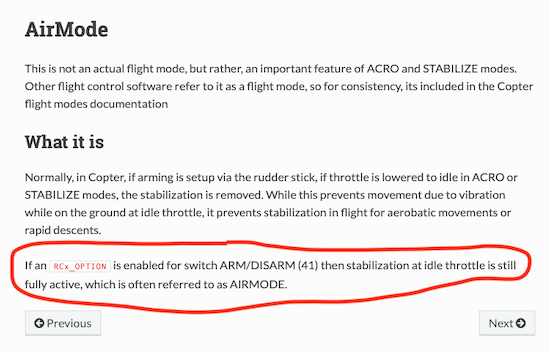
here is the section of the wiki that talks about airmode and enabling it. unfortunately it is a bit confusing as the way its worded makes it sound as though simply moving your arm/disarm to an rc channel other than the throttle stick will enable it and there is no mention of having to use motor interlock
1 Like
Interesting… I don’t think that was a thing, when I last read the wiki. Seems like maybe it’s supposed to do the exact same thing as interlock…
While you do still need to arm w/ interlock, you don’t need to disarm. It does that a few seconds after you flip the switch. There is a bit of a delay, though… I’ve accidentally killed the motors while flying, and just turned them back on and kept flying. .
1 Like
So, I just tried lowering the throttle with interlock, and think I see what you’re saying…
I just fly stabilize. So, it auto levels. When I lower the throttle completely, it does keep itself level, but I can no longer control its angle. That works for what I need it for. (basically just keeping it from tumbling when I lower the throttle for a fast descent).
But if it has the same behavior in Acro, that’s not right.
1 Like
It sucks that it’s related to arm/disarm - very dangerous
1 Like
I literally can see nothing in the code where enabling this makes any difference to the flight characteristics. @Leonardthall any clues?
1 Like
ok so I just got back from testing and found some very interesting results. mainly that the ATC_THR_MIX_MAN is the main parameter that needs to be changed to control stability while throttle is down (air mode) thank you @Leonardthall however it needs to be cranked all the way up to .9 or higher to do it well. MOTOR INTERLOCK has no effect on airmode or quad stability at low throttle at all but it does enable you to cut the motors right before landing to avoid the bouncing that you’ll get from flying with ATC_THR_MIX_MAN cranked up. (when landing on hard surfaces). You could do the same with the default throttle down rudder right disarm method right before you touchdown but the motor interlock method makes it a bit easier. I got video of my testing and I will edit and post it in here soon so you can see for yourself. also @Leonardthall @iampete would it be possible to get the wiki entry of airmode updated to better describe how to enable the Airmode? I would be willing to make a video showing how I have done it.
2 Likes
There is an “edit on github” link on the wiki - click that do your edits and create a PR.
1 Like
Can you do that w/ only the arming(airmode) switch? If you flip the arming switch off while the motors are powered, does it also cut the motors like “Motor Interlock” does?
If so, maybe airmode suites my copter better than interlock.
1 Like
when I had my arming set up on a switch only, then flicking the switch would pretty much immediately start and stop the motors. so I think you can set it up that way without even using motor interlock at all. when I had arm/disarm on the throttle stick, there was always a short delay with the disarm (throttle down yaw left) not sure why. you will still need to set ATC_THR_MIX_MAN to .9 or slightly higher to get the “airmode” effect
1 Like
Thanks!
And, the delay on yaw left is just to be sure the pilot really wants to disarm, and isn’t just doing an extreme maneuver or something for a second. (I think…)
1 Like
ah ok that makes sense. one more thing, if you put your arm/disarm on a switch, remember to disable your ARMING_RUDDER parameter
1 Like
I’ve never done any wiki editing before. I feel like I would want some permission before I edited anything. 
1 Like