You will have a large compromise needing an AIO. F722 doesn’t have enough flash to run Arducopter. Why don’t you go with an FC/ESC stack instead?
F722 does not have enough flash - need 1Mb minimum.
KakuteF7 AIO is ok as a board but currently a bit hobbled because the F7 sector size means there is slightly less available flash and the SD card requires a bunch of flash. So no CRSF for instance. This will go away when the custom build server is publicly available.
1 Like
I’ve had an 4-in-1 ESC burn and another fail mid-flight so I’ve been shy about using them for a quad that will be flying far.
Thanks, really helpful to know about lack of crsf support for the kakute atm. Is custom build server something that lets user select features they want in the build so there’s more flexible use of the flash space?
So alternatively I could get an h743-Slim and a matek pdb (Matek FCHUB-6S) to drive my ESCs. Does that look good?
Yea, nice combination.
So I tried scheduler loop rate set to 800Hz and the BLH_TRATE to 100Hz and the quad managed to finish roll autotune, but when pitch autotune seemed to complete, the quad entered a false failsafe for a good 35 seconds, which kicked it into smart RTL. So probably too much for this F4, though 35 seconds to clear the failsafe seems way too long.
I didn’t get very far in the rest of the testing since when I didn’t know at the time it was smart-RTL so I panic-disarmed, which caused the quad to fall out of the sky once the failsafe cleared and I broke a few props.
Smart RTL works flawlessly though; I thought it was quite amazing the quad kept rolling “out of my control” but always stopped short of hitting something. =P
1 Like
I did have a successful autotune at 400Hz loop rate, BLH_TRATE to 100 however, with MOT_THST = 0.40. I wanted to fix the low-throttle grinding sound (D-term oscillation because the motors do get hot when I continuously reproduce this?) before I tried to test the 0-throttle issue I reported earlier.
All I have to report on is to show a video of what this sounds like for some opinions. Note when I ease the throttle (ie. whenever I make the descend or if I wiggle the throttle as it’s ascending ), there’s a low frequency grinding-like sound. And I’ve been able to reproduce that same sound with the quad landed on soft grass before.
I’m confused by this since in Betaflight, over-tuned D oscillation tends to be a higher pitch whirring sound… and it usually happens across the range of throttle. And if it stuck out so much, increasing the throttle would always make it worse, not better.
If you are getting hot motors then you almost certainly need to drop INS_GYRO_FILT and ATC_RAT_*_FLTD
My guess would be that this is simply feedback oscillation made worse by propwash.
I don’t know what ESCs you have but have you tried playing with SERVO_DSHOT_RATE?
I only get hot motors if I continuously operate in the oscillatory mode by twiddling the throttle. If I’m hovering there’s no hot motor.
I’ve also been able to get that mode to drop to well below hover (but not completely disappear) with the same filter in previous configurations where I had THST_EXPO = 0 and SPIN_MIN = 0.12, and different tunes. I can freestyle aggressively for 5 minutes and motors are luke warm.
Going back to the more ‘normal’ settings for THST_EXPO and auto-tuning has actually makes this worse, but I’m playing around with it since I think also PID tune related.
I suspect autotuning may be blind to it because it’s not happening at hover throttle.
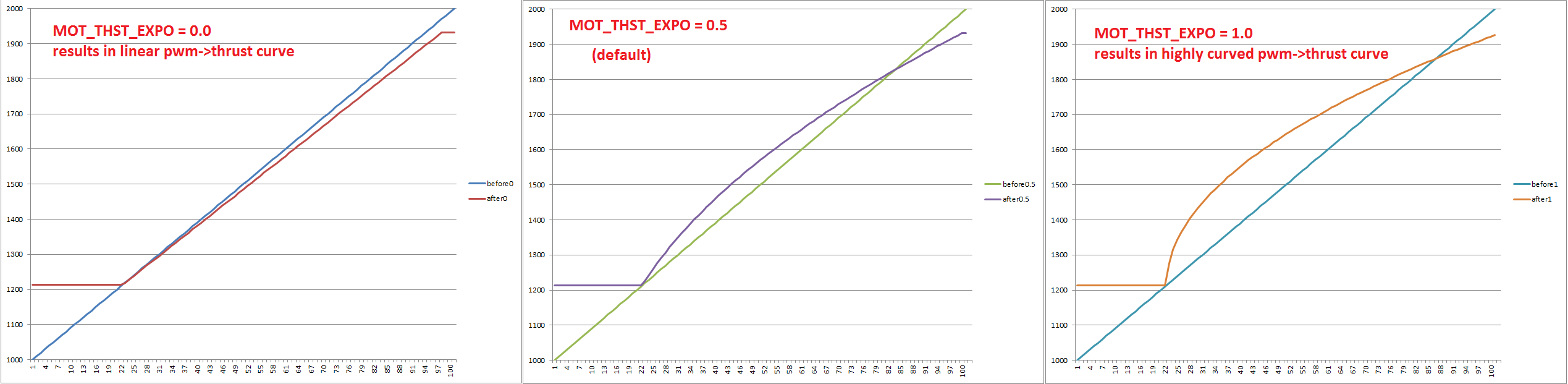
This is why the correct value for THST_EXPO is so important, it’s the only way the tune at hover throttle can apply correctly at high and low throttle values
I had one question on whether the THST_EXP and MOTOR_SPIN_MIN interact with each other.
Is the exponential curve calculated from SPIN_MIN to 100%, or is it calculated from 0% to 100%, and SPIN_MIN just provides a floor?
The graph from here would suggest it’s calculated from SPIN_MIN.
I have Spedix LS40 ESCs. I’m running DSHOT300 currently. This should be fast enough and I’m reluctant to go higher to introduce new variables (and on BF I’ve not felt much difference between DSHOT300 vs 600)
SPIN_MIN is zero and SPIN_MAX is 100% throttle. Generally there is a little dead band at the top so SPIN_MAX tends to be about 97.5% or higher for modern ESC’s. If you want good full throttle performance you are better off having SPIN_MAX a little too low than too high.
With expo set to something like 0.55 for a 5 inch, maybe a little higher at 0.6 for a 7 inch quad you should do autotune and then get a log with FAST ATTITUDE logging turned on while doing that test. The logs will clearly show you what if the grinding you are hearing is due to tuning / feedback / tuning issues. Then it is a matter of working out what tuning adjustment needs to be made to address your problem.
Note that set MIX_MAN higher (e.g. 4) will reduce low throttle drift in the presence of noise if your hover throttle is quite low. But be careful when landing as the copter will react against ground impact.
Would this process be to set up with some PIDs that feel good and run auto tune once. Or run it twice, first to get updated PIDs and second to get characterization of those PIDs?
I don’t have a good picture with what to look for or tune with the Attitude data. Would you recommend some resources or guides for this?
Leonard, sorry I misread what you suggested. Should be autotune and then use fast_attitude for hover testing right?
So I re-set my motor_min_arm to 0.03 (based on spin from motor test tab) and motor_min_spin to 0.06. With this, I ran an autotune with MOT Expo 0.55 and 0.6; I get the same results with that grinding sound at low throttle.
Just for curiousity, I did run an autotune with EXPO set to 0. That tune came out with really high values (like 1.5x) of prior values. The grind was there at low throttle (with similar magnitude), and there was definitive trilling of D oscillation at high throttle from overtuned PIDs. Given the low throttle experience stayed the same and just how far I’ve been able to push the quad with otherwise bad values, it feels like the low throttle grinding issue is quite different.
So biggest delta now compared to last week is my lowering of min_spin, so I just took the same EXPO = 0.6 tune, lowered EXPO to 0.3 (really a guesstimate), raise min_spin to 0.12, and get much less of that problem.
Does all of this suggest I should actually keep going higher on the expo or look elsewhere?
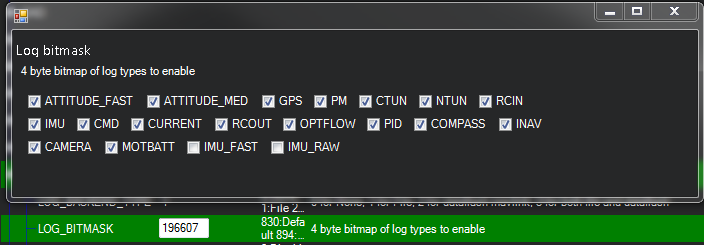
Hi, all we need is a log with these log settings:
after autotune with your expo set to approximately 0.6.
The first step is to have a look at your logs and see if we can see if the grinding sound is coming from the autopilot or from the ESC’s.
1 Like
I have the logs here. Thanks for taking a look. Would you be willing to show a snippets of what you’re looking for or what your thought process is?
Autotune: https://drive.google.com/file/d/1Hl14wRSZt6Nk8ve_E4Ft44bM0lliDrBb/view?usp=sharing
Hover test after autotune: https://drive.google.com/file/d/1ZbvEJZg2cXaMRwx3Cloomlc5t0IG27-Q/view?usp=sharing
1 Like
You didn’t set the logging the way I asked but I have what I need.
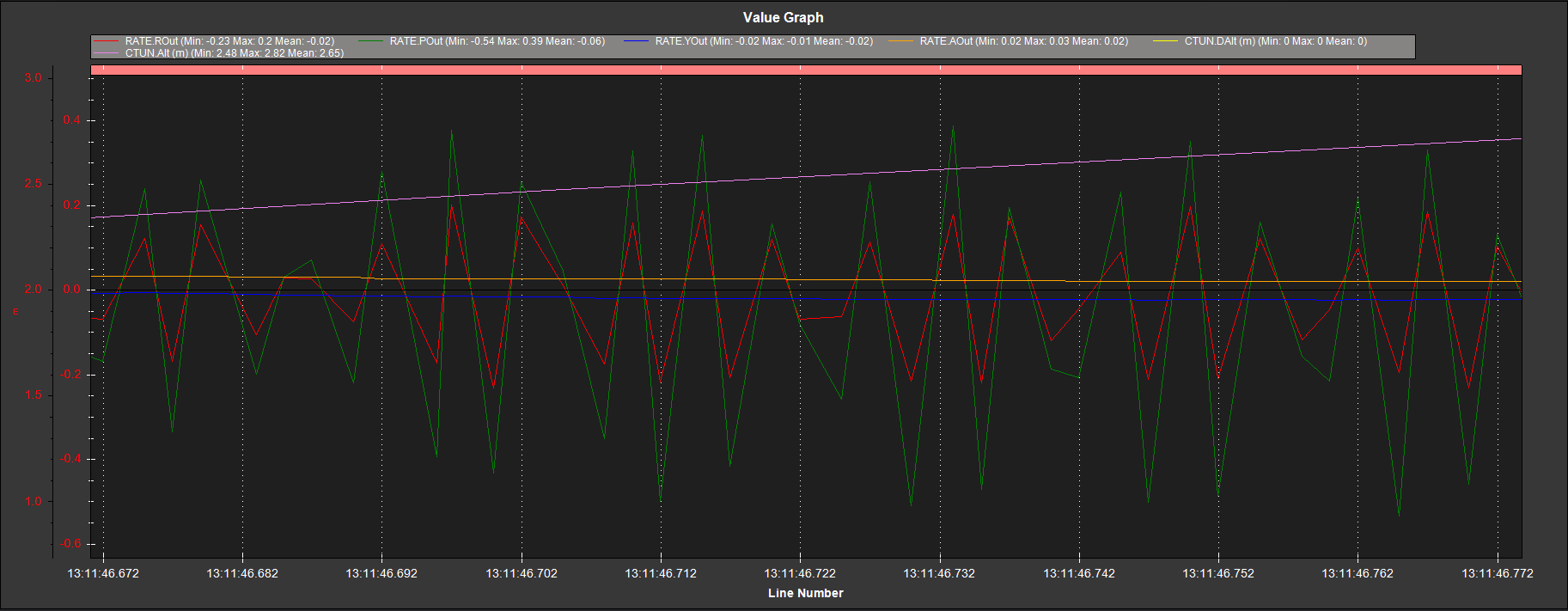
You are getting feedback through your PID loops. You have stupid high filter settings:
INS_GYRO_FILTER : 150 Hz
ATC_RAT_PIT_FLTD : 70 Hz
ATC_RAT_RLL_FLTD : 70 Hz
You have 170 Hz oscillation. Try setting your filters to a more sensible value and re-tune:
INS_GYRO_FILTER : 100 Hz
ATC_RAT_PIT_FLTD : 50 Hz
ATC_RAT_RLL_FLTD : 50 Hz