Caught the alignment with the right prop as soon as the glue dried.  It’s not directly in the slipstream so I’ll see what happens when it gets to forward flight.
It’s not directly in the slipstream so I’ll see what happens when it gets to forward flight.
@GregCovey
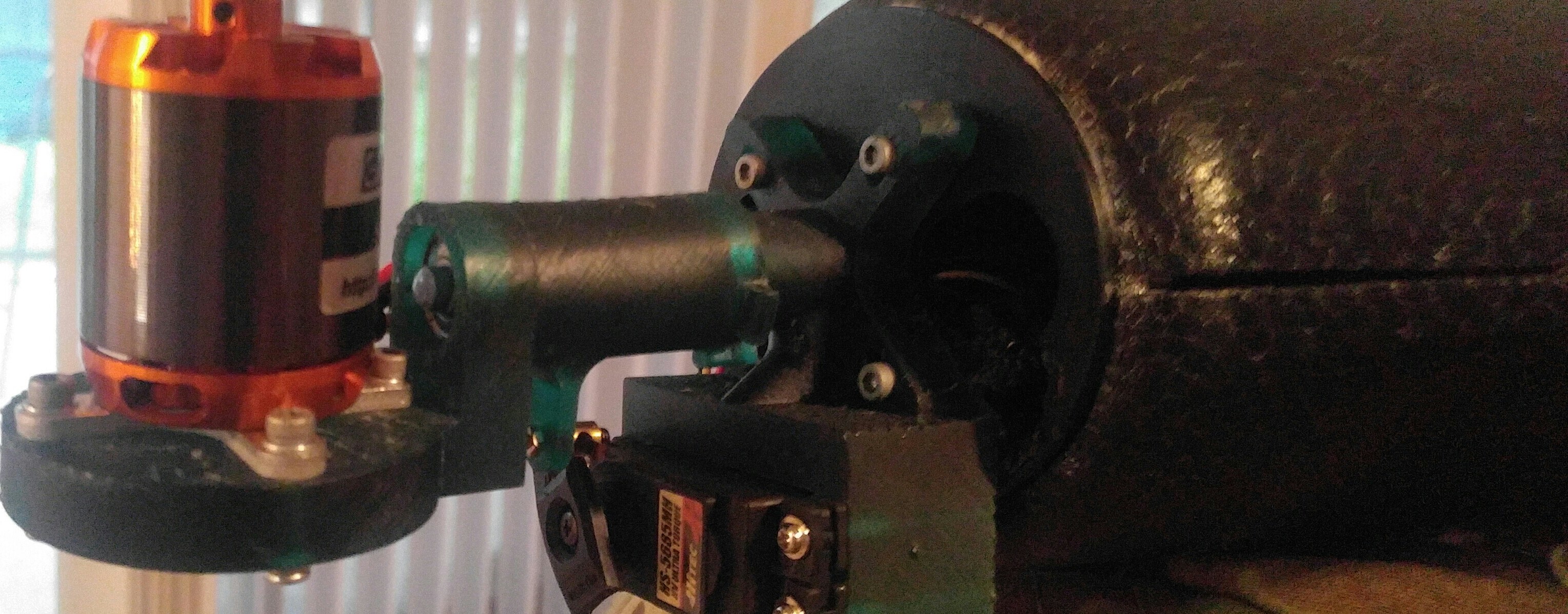
The forward tilt is simply a carbon fiber tube mounted on nylon pillow blocks and connected to a servo.
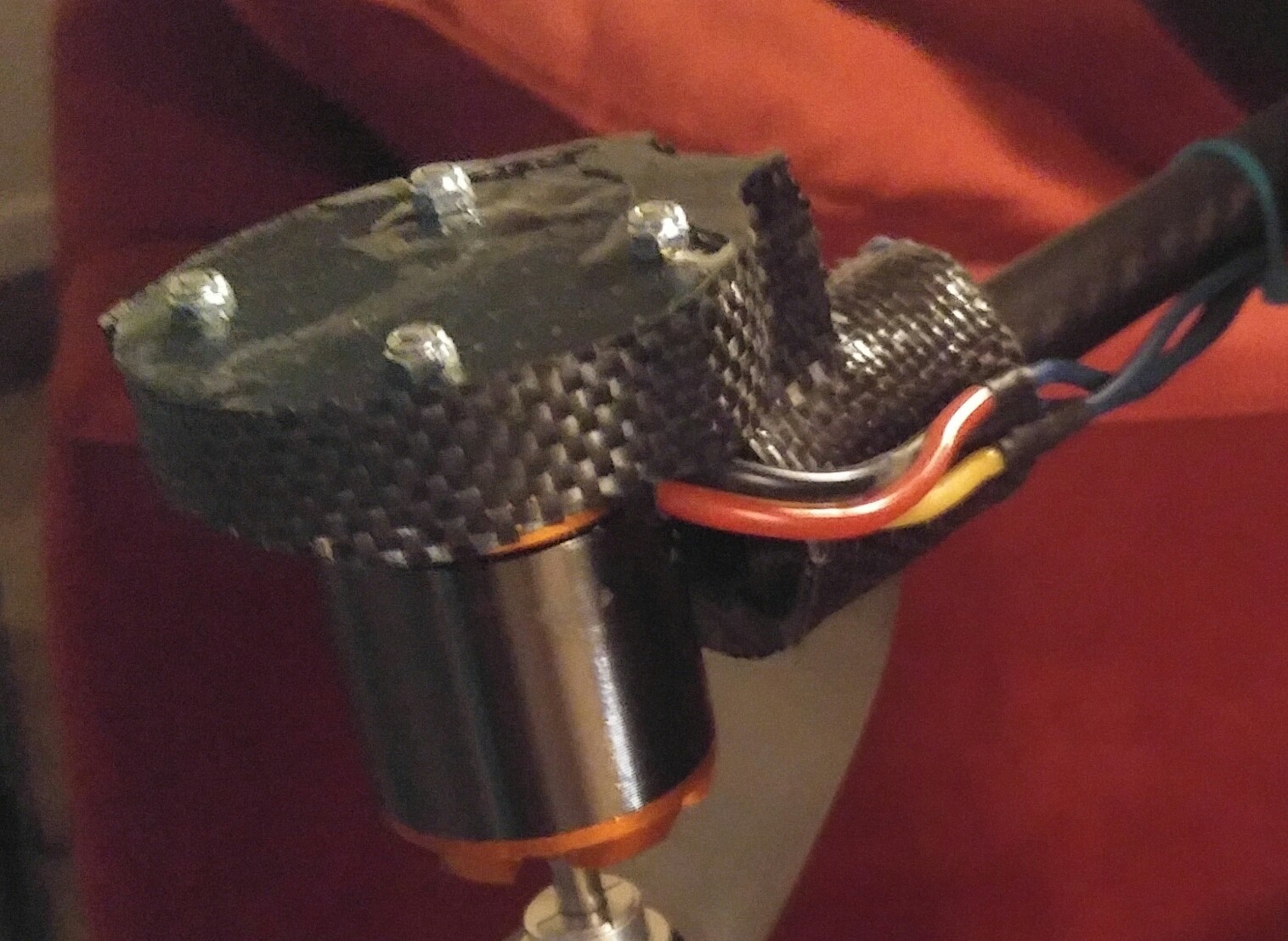
The aft is not a pretty mechanism, but it works. 3d printed, 1 hitec metal gear servo directly linked to the swiveling portion, 2 bearings and a 4mm steel shaft.

1 Like

Good documentation, good luck with your test flight.
First transitions with vectored yaw successfull 
In the same flight we had the ms5255 instead of the 4535DO airspeedsensor installed and are also very amazed.

@Tridge: is tilt for fwd thrust already merged into master ?
We would test it in QLOITER.
Regards Rolf
1 Like
Rolf, can you post your parameters? I’m pulling my hair out I can’t get vectored yaw to work still, it’s as if it’s not ‘turned on’…
@Rolf thanks so much. Finally I have some success. I loaded your params and compared them line by line. the one that i beleive made a difference was Q_TILT_YAW_ANGLE. Mine was set to 0. Odd though I would have thought I touched upon that setting at least once… But nothing else really jumped out at me as being the culprit…
Anyways I’m still setting up the hardware and airframe.
Im used to flying planes with a ‘free’ throttle stick and multirotors with a self centering stick. I would imagine these hybrids require a self centering throttle as well?
thoughts?
and are the front motors supposed to tilt forward to move forward ? or is that gain only for fixed-for-forward-flight-only motors?
Thanks! Progress!!! 
1 Like
not yet, sorry!
I’ll post here when its done
when transitioning to a fixed wing mode, yes. When in a VTOL mode they only tilt for vectored yaw control at the moment. I plan on making it possible to tilt them for forward flight in VTOL modes too, but not done yet.
great! So glad you got that working. Is does make the tail rotor quite a bit simpler.
the one from Jordi?
yes, the one from Jordi.
Hi , Greg
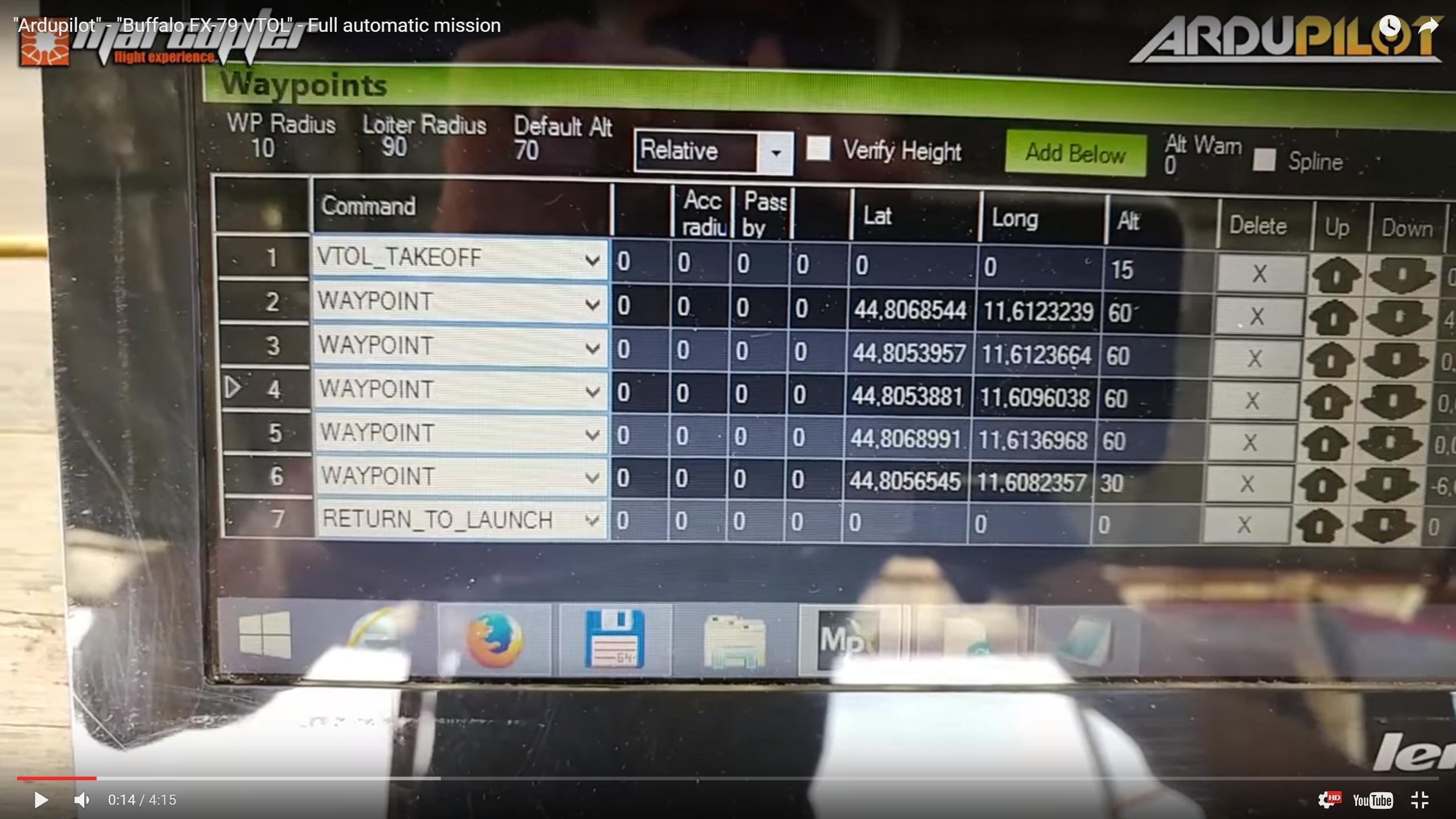
I have finished my setup and now iam ready for flying and i want to make full auto mission VTOL takeoff and landing and during the mission mix between fixedwing and tricopter , i need the waypoints sequence for that if you could please , here you are my plane

1 Like
Hi,
Wow, that is a big VTOL! It is similar in size to Tridge’s plane with gas-powered forward flight.
My technique for a mission plan may be considered “old school” by now. I started with FireFLY6 plans and converted them (where needed) to APM plans in Mission Planner. The QuadPlane design for missions is slightly different. You can see the difference between mine and Marco’s when he is using the latest 3.8.0b5 build firmware. Perhaps Tridge will comment from his developer and extensive autonomous experience.

wow it looks very neat…
@tridge could you tell us your developer and extensive autonomous experience way points map or sequence for latest modified firmware , thank you
thank you very much Greg 
So i had time to test today. Although the servos are now working for vectored yaw, I still have problems with the motors
In Q_Loiter and FBWA I have no power to motors at all, only MANUAL mode.
@tridge I’m using your parameters i dont see anything that would make this happen. and youre not having this problem so does anyone have any ideas?
hey Greg i have done transition with the two motors successfully on land but i have a problem , my tilt yaw servo in qstablized mode have no response for anymotion of my rc stick motion , could you help me with that ,
thank you