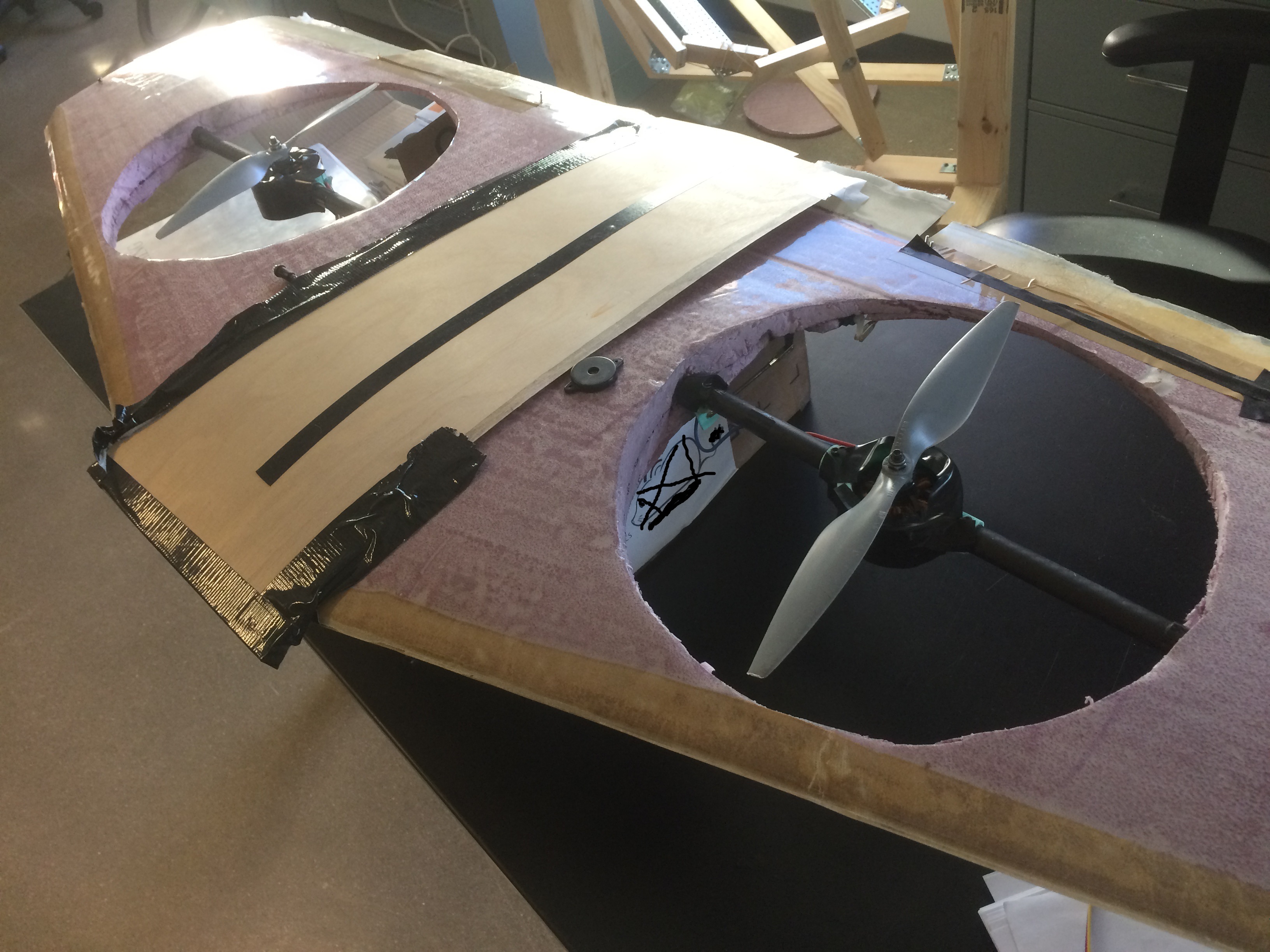
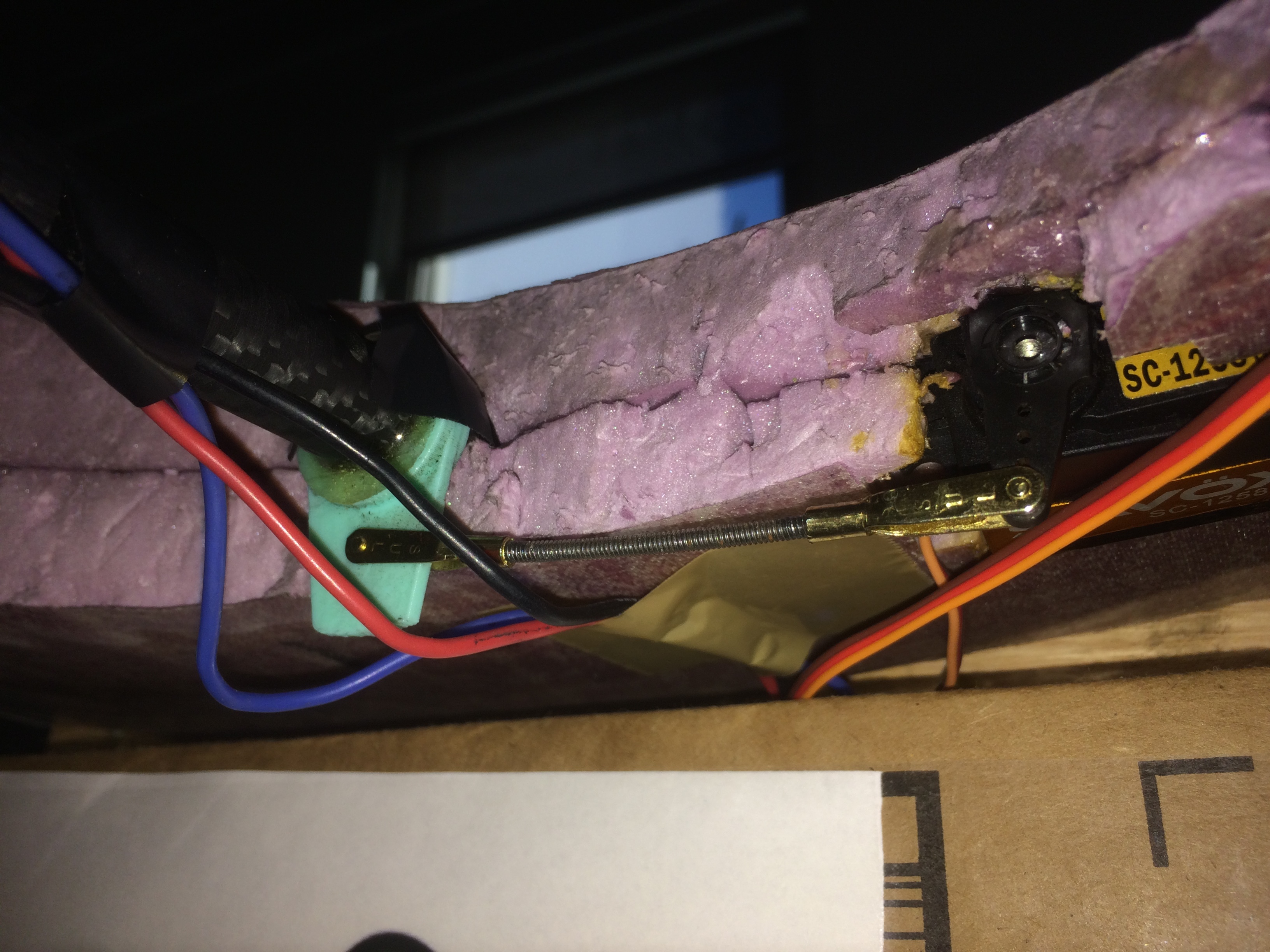
Rotors are tilted with servos, roll works with thrust differential, yaw works by tilting one rotor forward and another backwards, and pitch is controlled by tilting both rotors in the same direction, and the mixer is as following:
actuator[0] = - rp_scale*pitch_thrust + yaw_thrust; // Right
actuator[1] = - rp_scale*pitch_thrust - yaw_thrust; // Left
_thrust_yt_ccw = thrust_out - roll_thrust; // Right rotor motor
_thrust_yt_cw = thrust_out + roll_thrust; // Left rotor motor
output pins are same as Coax: pins 1,2 - servos, 5,6 - motors, 3,4 - elevon servos.
Thanks in advance