Hi All,
I’m currently installing and configuring a Pixhawk to be used with a Trex 600E. I want my actual FBL controller to handle the rate control of the helicopter. This has already been done by the Canberra UAV team : http://diydrones.com/profiles/blogs/canberra-uav-demonstrates-helicopter-flight-with-downstream-fbl?id=705844%3ABlogPost%3A2210017.
Everything is fine, excepted the ESC throttle control (Heli RSC) which is not acting as expected. Here are my observations about the problem :
-> conditions : armed, H_RSC_MODE = 1, collective pitch neutral after arming, no power module connected
-> observations :
- If RC8_FUNCTION = 31 (HeliRSC) -> CH8_out stuck to RC8_MIN, even if CH8_IN is moving

- If RC8_FUNCTION = 1 (RC_Passthrough) -> CH8_OUT following CH8_IN
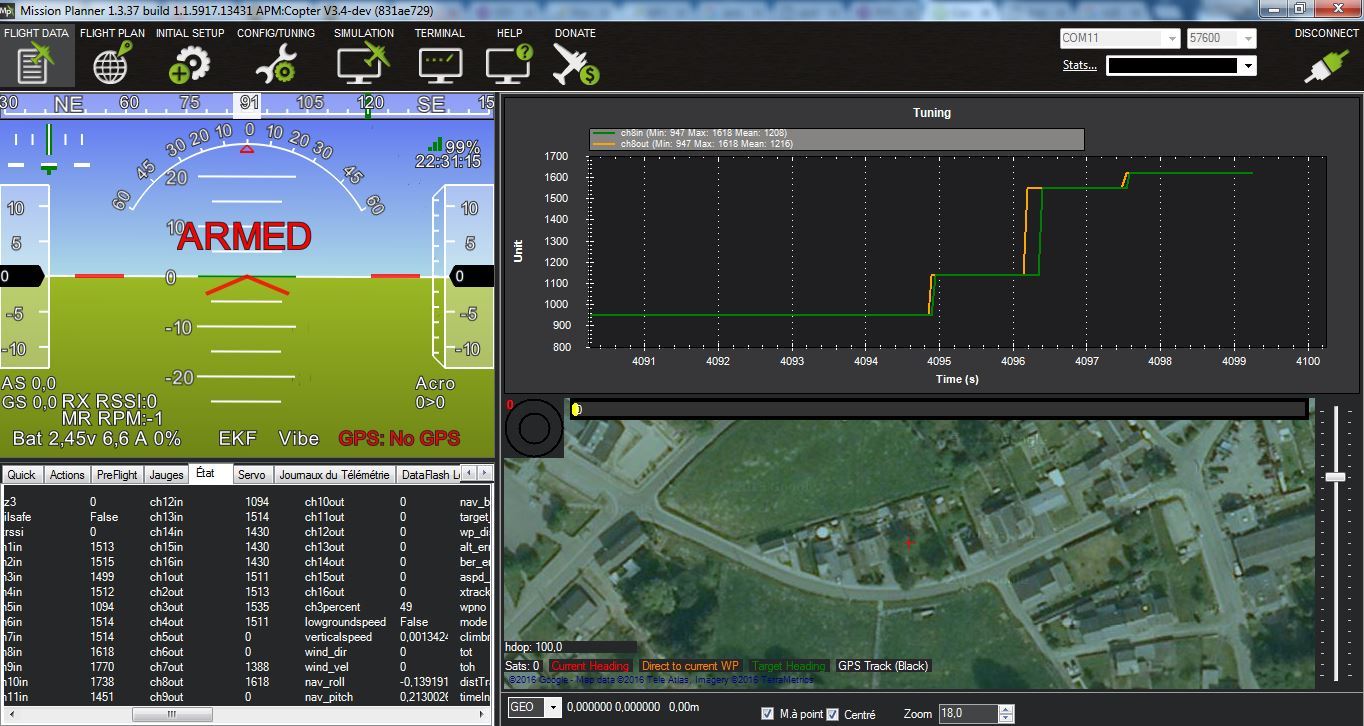
- In any case, auto disarm after delay
Of course I could set RC8 to pass through and remove the disarm delay, it will work but I don’t like to shortcut the established protections of the system.
I managed to get it work correctly with Copter 3.3.3 TradHeli. Other problems with the channel passthrough in ACRO mode (IN and OUT not matching well, escpecially for the yaw axis) lead me to use Copter 3.4. These problems are solved by 3.4 and I’m satisfied with the passthrough of CH1 to 4.
I don’t know if it’s due to a bug because of the dev version or to a mis-configuration from my side. After reviewing all the parameters, I could not find something, this is why I request your help about this.
Best regards…