This is a story with my Y6 and 3.4…
Introduction first
Spec:
Pixhawk original with ublox M8N GPS(double anti vibration mount,GPS stand 15cm)
Y6 foldable carbon frame 820mm mot. to mot.tarot retracts
Turnigy Multistar 4830 420KV 650W
Tarot 20"x5.5" propellers with Foxtech quick detach adapter
2x10Ah 4S multistar 10C LiPo
Mauch Power Module-Sensor 6S BEC
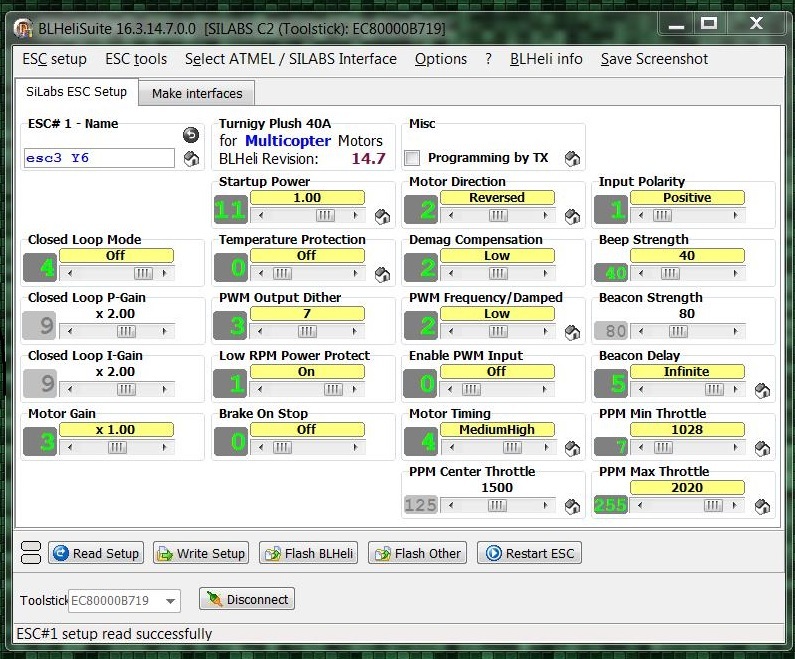
Turnigy Plush 40A with BLHeli 14.7
(standard settings with temperature protection,damped light both disabled,timing medium high…)
433Mhz two way radio upgraded antennas
Graupner MX20 with GR24
Y6 is 3325 gr.
AUW with 2 x 10Ah Lipo is around 5.3kg >>>flight time 20-25min…hoover around 55A…at 34% throttle
Hi Emin, looks cool!!
If you don’t mind sharing with those of use who are interested in your build -
What is the AUW?
Which FPV Cam, Recording Cam, and Gimbal are you intending to use?
Which VTX?
With all FPV gear, cams onboard, your expected AUW?
What is your calc Flight time?
Your application?
…After i did not fly for few months waiting for 3.4 month ago iwe finally update it…
As i remember i try it quickly and it was flyable…i also did small rebuild of everything on Y6,and possible other unnoticed issues…and then my next update was the one where was some PID translations…i can’t exactly remember what rc version of 3.4
And that is when problems started which i successfully overcome…
After that update i went to field and all hell break loose when i try to fly…with very small throttle copter become like crazy in all directions,luckily i manage to land it with only one leg slightly bent on T connection…
Before that flight iwe also updated BLHeli firmware to the latest 14.7 and maybe changed a few settings…at home everything seems fine…
When i almost crash my first association was something is wrong with ESC…and indeed it was bcs i enabled one shot in mission planner and didn’t know that calibration with that option does not work…strange when i was doing ESC calibration routine(as 100 times before) motor responded very vel and throttle followed stick commands…??
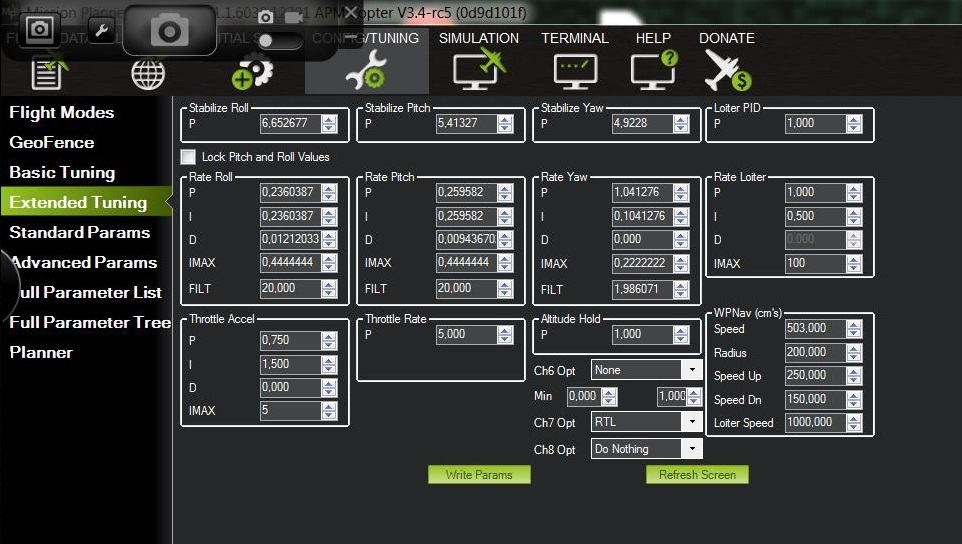
At the field disaster…ESC totally uncalibrated.after few more tries i went home and find out that somehow (probably in translations)my pitch PIDs went from 0.16 range to 1.16 range… that was this;
Few days later i went to field determined to do Autotune,with my ESC properly calibrated…my first try i made mistake and adjusted autotune on pitch and yaw,from lowest point and that flight almost cost me copter again bcs. everything was more than 20 min and when i was at the very end of both axle my lipo alarm went on…an i was pushing hoping to finish and have at least some numbers for next try…iw landed on 3.4 lipo cells or less on failsafe…ok…
Next day i was more prepared,but unfortunately this time i left new option of learning Throttle mid on day before,and something was wrong with that so when i first try alt hold my copter start to fly uncommanded up…i knew it th.mid is wrong…it was around 0.65 and real value from logs is 0.41…that day i was to nervous to tune more…
04.09.16
Next day is here…nice and calm…Pitch autotune was long but successful…separate tuning of course…yaw autotune also longer than i expected (but much less than pitch) succesfull…iwe emptied my LiPos for that day with that 40Ah
09.09.16
Next day it seems it was again day for weird things…my roll tune wasn’t nice even autotuned before…so i started again.This time even with decent alt hold and not to much wind,copter drift very very slow,autotune don’t want to start?!when i took a better look and move stick 1 step started and than stop…i went thru all autotune like that;stick move -step of autotune… and manage to finished it and results was not bad at all(that was when Randy sad somewhere that Leonard changed something to be easy for large copters)
In another rc4 thread Randy answer this “Emin, that sounds like the stick are not fully centered so during autotune it thinks that the pilot wants to control the vehicle.” but i do not understand bcs.my sticks look centered
12.09.16
Next day i was hoping to fly…even call friend to make small video…everything was ok BUT when i switched to loiter copter start drifting and act strange,stupid me i even try few times…something must be wrong with GPS, landed and
noticed that very,very small piece of my GPS ceramic antenna is broken,at bottom hardly visible…i went…
short video from that day;
16.09.16
Since i have even bigger X8 with Pixhawk,same setup i replaced y6 cheap 30$ GPS with CSG shop 80$
with external magnetometer ,advanced one with HMC5983,temperature resistant…Today i went for flight…and didn’t noticed my tablet was on standbay all night with battery drained,so final log is short,i don’t like to fly blind…i tested alt hold and it is very good,even in fast forward flight…Loiter is perfect,but after i reviewed logs i noticed only 4 GPS satellites??? How is that possible with Hdop around 0.65 all the time?
I will try to upload correct logs but please don’t blame me if i mess with timeline bcs i have other timelines in my everyday life…last 3 days was on 3.4 rc4 for others i am not sure…will upload rc5 today
i think you need to upload logs on dropbox or similar because here the limit is like 2 or 3 MB each file.
Another thing i prefer with more expensive gear is to only fly stable releases.
This is my opinion probably just because i cant afford crashing the expensive stuff.
Thank you Linus,this is my less expensive bcs other is X8…believe me,i can’t afford any crash either,but how else to test real condition on big multi…
this should work…10 dataflash log files…i hope iwe upload them all bcs.at the moment its a real mess in my old and new logs…update;i just read in RC5 release notes about strange dates in logs… "d) dataflash time-going-backwards fix"
i am afraid i deleted few of this when cleaning my Pixhawk SD card from logs…
logs with dates back to year 1979 and 2000,i am here for long time,but not that long
Hey Emin, I’ve got myself a heavy Y6 as well. Running the following setup
Tmotor 4120-400kv
13x5.5 (and 15x55 with alot of payload)
Xrotor Pro 40a ESC (in-tube installed) (DEO enabled, ie active braking)
AUAV-X2Q flight controller w/ 3.4-rc3 installed
6S battery, been running 5Ah, 7Ah, 10Ah, 16Ah sizes.
AUW is around 4900g with gimbal and 2x5Ah batteries
15minute flight time, 28amp draw on 13x5.5 props, these motors really need 15x5.5’s.
My pids i got from auto-tune. At first it was VERY overpowered on 1555, down-propped to 13x55 so i can run 6s 5000 mah batteries for the auto-tune. I had to change the filters so that it could actually finish an autotune. Had to run pitch,roll and yaw seperately (not enough battery), but eventually i ended up with a very flyable craft. Still needs more tweaking tuning.
Here’s what I did that worked
-enabled battery autoscaling
-lowered AT Hz to 10
-one axis at a time
-set throttle hover to very low
“For large copters (with props at least 13inch or 33cm diameter) set the Rate Roll and Pitch filters to 10hz (in Copter-3.3 these are RATE_RLL_FILT_HZ and RATE_PIT_FILT_HZ, in Copter-3.4 they are ATC_RAT_RLL_FILT, ATC_RAT_PIT_FILT)”
Hey can you post your BLHELI settings for 14.7? I’m running the same version on my Tarot 690XS quad with 380kv sunnysky and 30amp littlebee’s.
I’m interested in seeing how they’re configured, I was running with dampening light and was having issues with 3.4-rc5 and autotune. Had to remove demag/dampening to get it stable but motor response isn’t as crispt. Does fly very well now, although i’m still toying with it.
Lastly, looking at the logs your “NSats” are around 16 satellites. That’s the number of satellites you see. 16 is very good. Your “GPS.Status” is 4, is that what your looking at? Your HDOP is ridonculous, so don’t think you have a GPS issue.
Looking at the docs, GPS.Status of 3 means you have “3D Gps lock”, not sure what status of 4 means, but gotta be better than 3 right?
FIELD DESCRIPTION
Status 0 = no GPS, 1 = GPS but no fix, 2 = GPS with 2D fix, 3 = GPS with 3D fix
Time The GPS reported time since epoch in milliseconds
NSats The number of satellites current being used HDop__: A measure of gps precision (1.5 is good, >2.0 is not so good)
Lat Lattitude according to the GPS
Lng Longitude according to the GPS
RelAlt Accelerometer + Baro altitude in meters
Alt GPS reported altitude (not used by the flight controller)
SPD Horizontal ground speed in m/s
GCrs Ground course in degrees (0 = north)
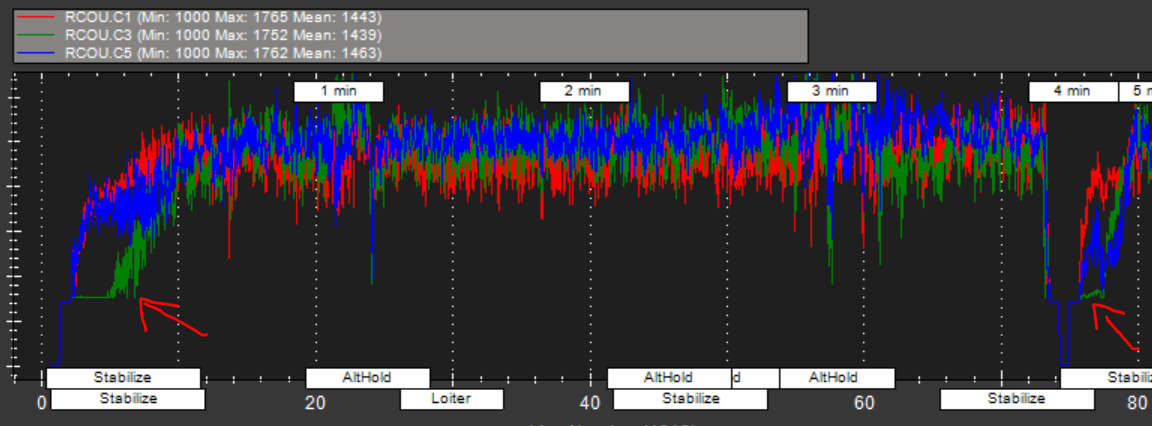
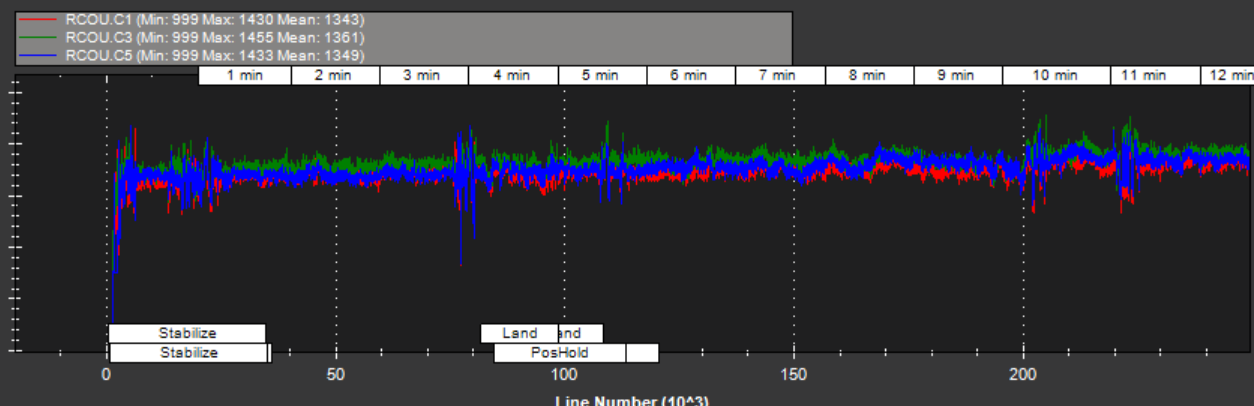
So with my Y6 i try to balance the drone so that all upper motors(1/3/5) are outputting the same and all lower motors(2/4/6) are outputting the same. Especially during hover and climb/descent. In your logs, on launch your front motors are working harder than the rear. How’s your COG? Just looking at your pictures, your tail might be a bit long, your COG should be here, which looks about right, but not sure if your running a gimbal/etc that might add some front-weight.
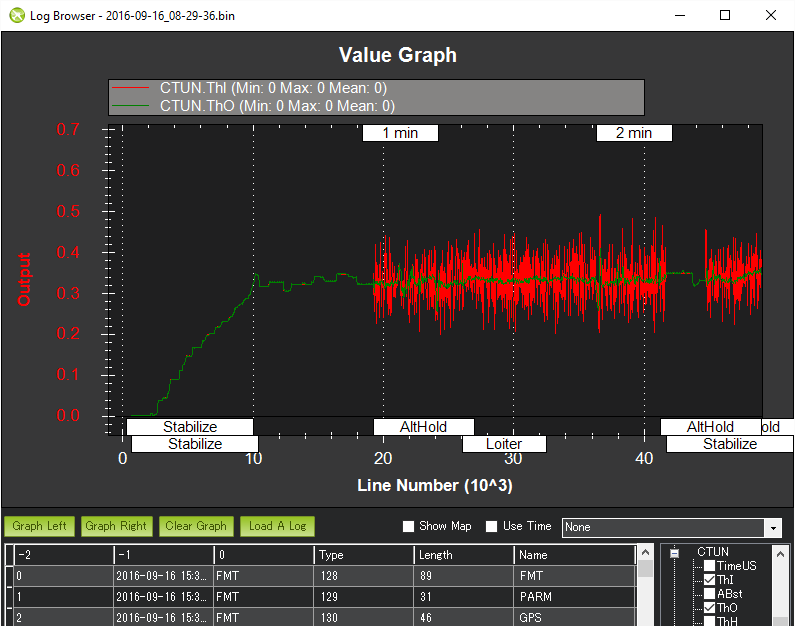
Linus and I had a look at one of the logs and there’s a few things that look odd. There’s some unusual oscillation in both the throttle output from the altitude controller
For the throttle oscillation could you try reducing the “Throttle Accel” gains a bit? The defaults are below and I think these values or even lower would be fine:
ACCEL_Z_P to 0.5
ACCEL_Z_I to 1.0
I think it might also be good to reduce the Rate Roll P and Rate Pitch P and D values by 40% maybe. Perhaps these numbers will work (your PID values * 0.6)
ATC_RAT_PIT_P = 0.155
ATC_RAT_PIT_I = 0.155
ATC_RAT_PIT_D = 0.0056
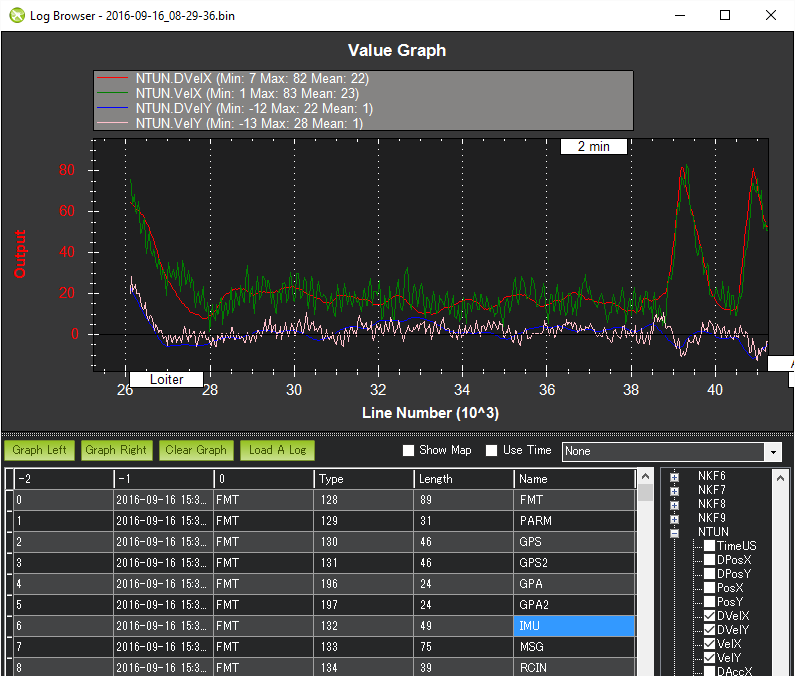
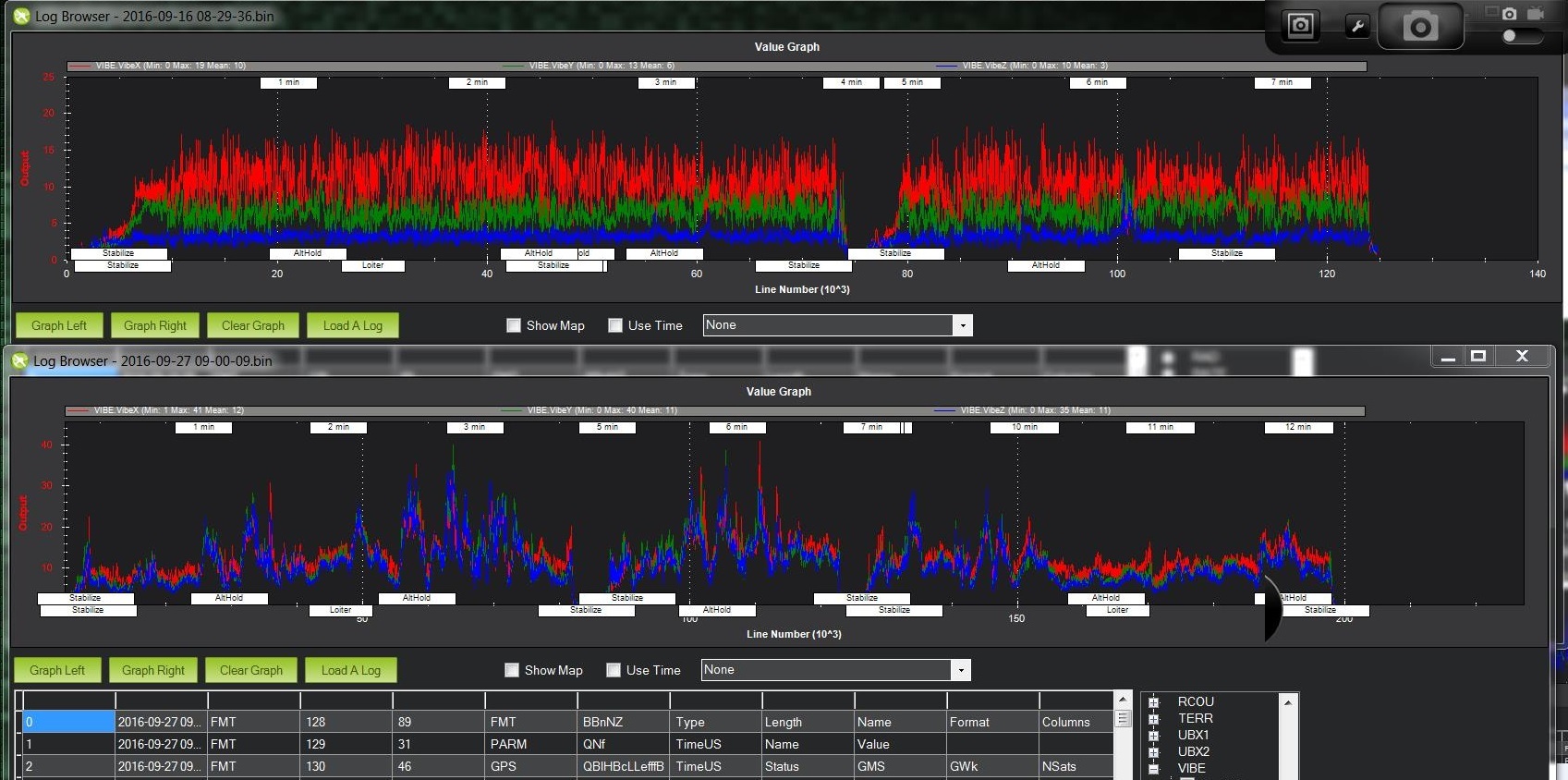
The velocity shaking is quite unusual. I’m not sure what is causing this. The X-axis (i.e. forward-back) vibrations are a bit high (about twice that of my IRIS) so that could be it. It’s really hard to know what the cause of this vibration is.
I’m also a bit concerned about the GPS mast. It look a bit tall and I wonder if it’s waving back and forth in flight could be leading to some of the oscillation in velocity (although the frequency of the oscillation looks too high for this).
Anyway, could you try these suggestion? I guess you also plan to upgrade to -rc5 which is great (the log I looked at was -rc3).
First ,thank you all for answers about my unusual setup…i will try to answer them all,but i need some time…
This Y6 is actually my testing rig for bigger X8 with very similar components…
So,some of my experiments with mounting AutoPilot (AP) and bottom part of craft (landing gear with LiPo/gimbal holder) might lead to problems mentioned above…
Here are my BlHeli settings…
I do not use Damped light even my ESC can…from multiple sources i read how it is not good for the craft as big as this one…also i have quick-detach adapters for this big props and with breaking on they can spin off…
Thanks Wifiguru…you have nice setup there…mine is bit too heavy and too “clumsy”
About your Autotune results,please pay attention to your Throttle accel settings…as i know “I” should be double what “P” is…
About your advices…
-battery autoscaling was enabled
-AT Hz is at 20…i will lower it to 10 in next try…
-one axis at the time…of course,no other way…i just wonder do i make mistake and start autotune every time from beginning… How can i set AutoTune to start from current PIDs?Is it automatic?
-i am not sure what do you mean;set throttle to very low?before AT i always do short flight and check logs where is my Thrttle mid point…in my case around 0.41 THIS WAS MISTAKE…ACTUALLY IS ON 0.34
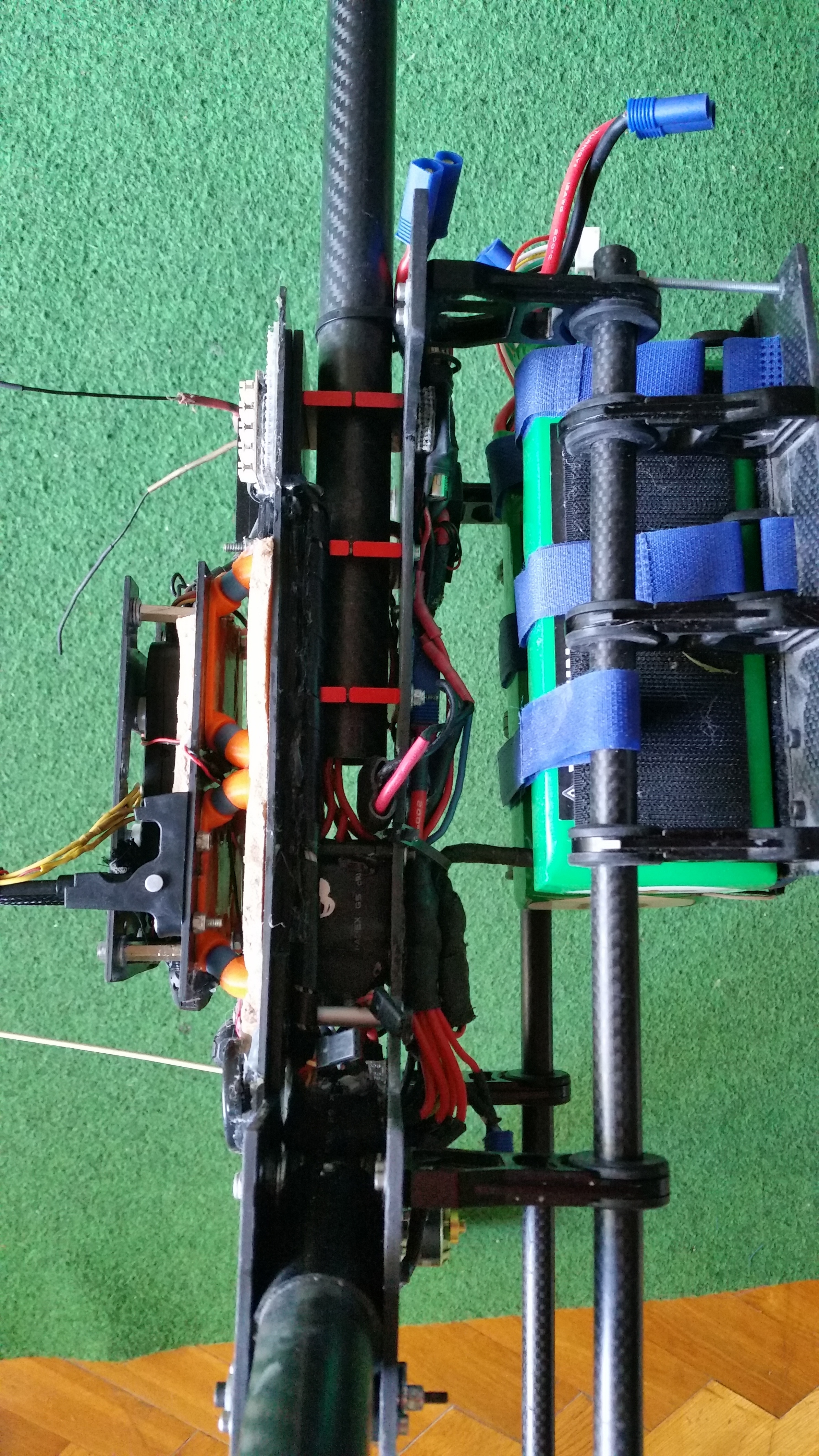
I think my Y6 is balanced well,and AP in the COG…picture you see it’s not directly from above…
Also my Y6 is more like T6,with front arms opened a bit more(to avoid props in video)and back arm a bit longer,but still motors in circle and at same distance from AP.
Problems might be others which i will explain latter in answer to Randy…
This Autotune was made without gimbal bcs. i did small rebuild and needed to fix problems first…
Also my bad experience in the past teach me not to have gimbal on copter during autotune…you rather do another autotune with dummy weight as a gimbal(extra battery is very similar and also can prolong your autotune)
About my motors output…hm…i am not clever enough to figure that out…not yet…but what u see at beginning of the flight is maybe due to uneven terrain and to short bottom tubes on landing gear(iwe changed that,bcs sometimes in this flight’s my copter tip off at landing)
About my unusual oscillations;
I am sure part of my problems must be in soft antivibration mounting of Pixhawk and maybe landing gear…
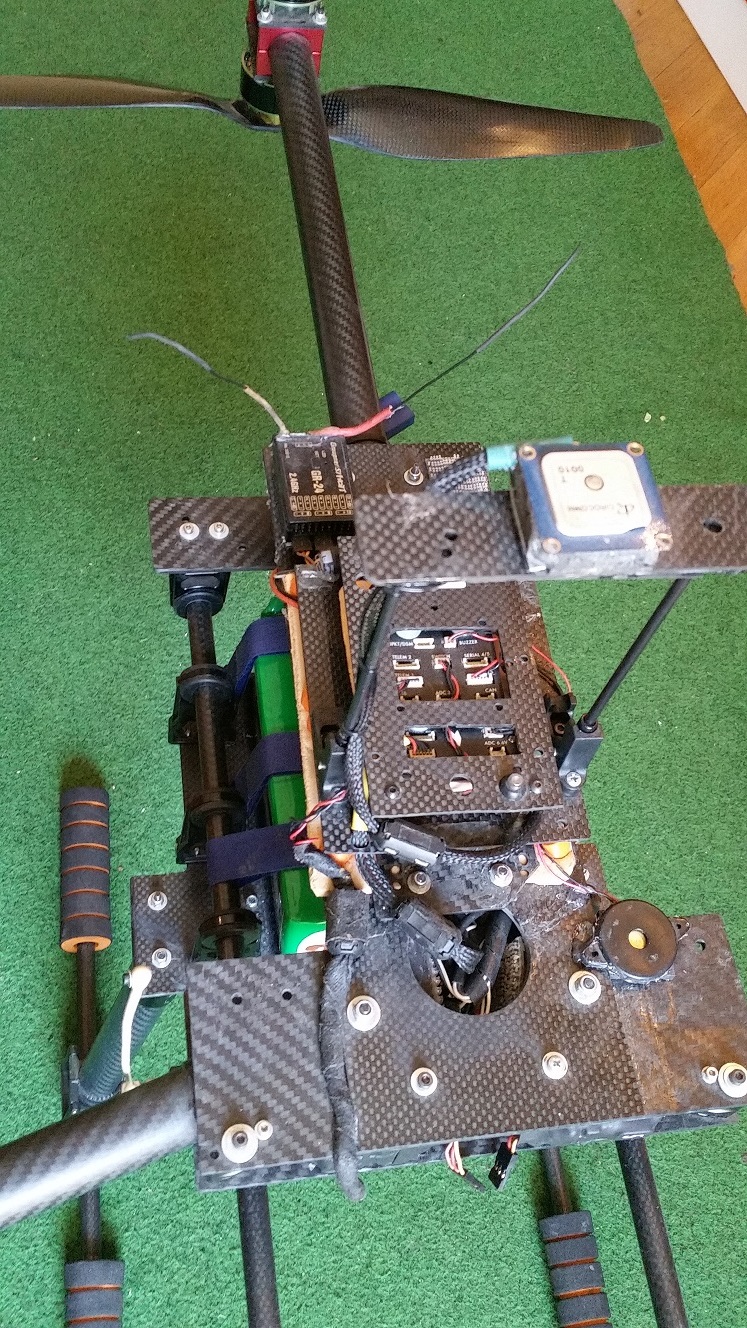
Here is picture of it;
Description goes something like this;
On Orange latex foam(HK) http://www.hobbyking.com/hobbyking/store/__26457__Anti_Vibration_foam_Orange_Latex_190mm_x_140mm_x_6mm.html
i mounted TWO antivibration mounts(classic one with 4 SILICONE rubbers,as suggested in manual)
connected above to carbon plate on which Pixhawk lay on another orange foam ,squized from above in sandwich with top plate which is touching only thru PC hard disk silicon rubbers…
Also i have 15cm GPS mast…in fact i have two exactly bcs. of the problem Randy is suspicious …and they are connected together in very solid construction…no wobble or any possibilities to twist.
After i inspect everything i notice that there is play in two above mentioned antivibration mounts bcs. they are not mentioned for all the weight i put on them,even on two …and because of that the whole thing,pixhawk and gps mast can move in extreme fly conditions…
Also,bottom part of my craft consist of landing gear retracts with battery and camera mount holder…everything is connected with double Tarot 12mm tube antivibration mounts…
12mm (2mm wall)carbon tube is very stiff,but this mounts are not,rubber inside too soft.there is wobble there as well especially without gimbal…
Because of all mentioned above i decide to make everything much stiffer…
Wobbly Pixhawk mounts are squeezed all together,Pixhawk now can’t move in any direction…when i hold and move GPS mast the whole Y6 move…there is no wobble anywhere…
Also i connected landing gear with two extra screw and put another plate in front to hold tubes making them more straight and less prone to craft movements…
I did repeat accel,compass,compass/mot calibration after all this…
ABOUT FLIGHT TODAY 27.09.16
Since my last flight on 16.09.16 i changed few things as Randy suggested
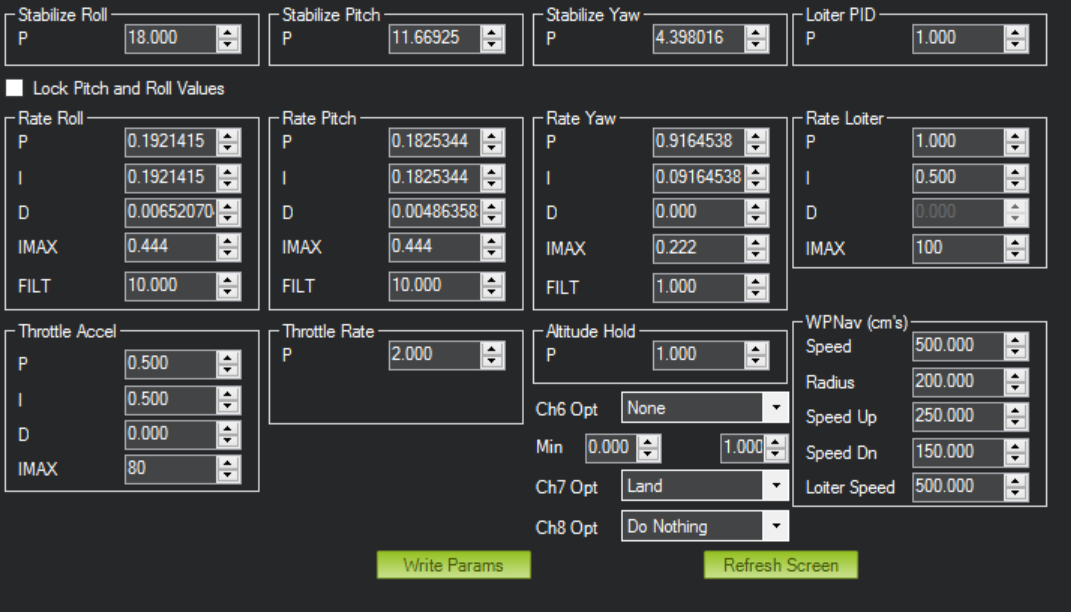
"…or the throttle oscillation could you try reducing the “Throttle Accel” gains a bit? The defaults are below and I think these values or even lower would be fine: ACCEL_Z_P to 0.5 <<<< 0.75 at end of flight i also try 0.6 and 1.2 ACCEL_Z_I to 1.0 <<<< 1.5
I think it might also be good to reduce the Rate Roll P and Rate Pitch P and D values by 40% maybe. Perhaps these numbers will work (your PID values * 0.6) ATC_RAT_PIT_P = 0.155 <<<< 0.236 ATC_RAT_PIT_I = 0.155 <<<< 0.236 ATC_RAT_PIT_D = 0.0056<<<< 0.0121
I MADE MISTAKE BCS. MY MOT_THST_HOVER IS AT 0.41(AND I MADE THIS FLIGHT WITH THAT) BUT ACTUALLY IS 0.34…WILL TRY AGAIN WITH REAL VALUE…i know it is overpowered bcs it is ready for 2kg camera/gimbal weight…if i try next autotune i will add extra 2x10Ah LiPos (1.65kg),maybe that will allow me complete Autotune,all axes at once…
I noticed that my craft is flying much more calm kind of lagish…i am not sure if i like it,before was much more “crisp” and responsive(my rc feel is on 90%)…also motors are much cooler than before when they where hot,almost on the edge of acceptable…
Althold…normal flight is perfect,but fast forward…hmmm…
If you look thru my log pay attention that on my SECOND LOITER i pulled my retracts up to observe if propwash on them have some influence on flight characteristics…nothing visible i noticed…looks even better
Also during part of the flight(i think middle of log) i left Compass learn enabled…i am not sure if compass is calibrated any better after this…
Vibrations before(soft AP mount-16.09.16) and after(stiff AP mount-27.09.16)
Also oscillation in the vehicle’s actual velocity is much better but throttle output from the altitude controller is again weird…
Is something wrong with my RC station throttle output?
I CAN ONLY THINK OF THIS;my Tarot retract landing gear is not connected thru Pixhawk or PPM but to one of free channel directly to receiver…landing gear is connected to same LiPo and ground… CHECKED ITS NOT THAT
ESC calibration?
Two of them calibrated minimum 1028 instead 1024 like all others(max is 2020 on all) …
Should i set all to same min value?
In Mission planer min-max is set to 1000-2000)
PPM centre throttle(in ESC BLHeli settings software) is at 1500 when actually mathematically middle is at around 1525…default BLHeli settings is 1488…but i don’t use central throttle,is this important at all?
PLEASE TAKE A LOOK AT BLHELI SETTINGS IN ABOVE POST…
I didn’t have enough time to test more…
Please make your observation…thank you
After close inspection thru mission planer Radio calibration I found out that my throttle have jitter/pulsing for value of 1μs…roll,pitch,yaw as well…actually there is jitter/pulsing on all channels for value of 1μs…i disconnected landing gear from receiver…repeated Radio calibration does not help…it is something in RC but what…?
As i understand by reading on the web,pulsing of 1μs is ok…to avoid any problems with that i need to set Input deadband ???to 5μs…let’s explore how to do that…
Before i did not notice any problem…but i have same problem on all channels…nothing i can see inside my RC
DOES ANYONE HAVE IDEA HOW TO SET RC DEADBAND IN ARDUCOPTER?Is it calculated in already?
Something similar is explained in this video…THE QUESTION;IS THIS MY PROBLEM AFTER ALL?
SOLVED I found the parameter responsible for that RC1_DZ or RC3_DZ…dead zone around trim or bottom…mine is set at 30
Quick thing, with BLheli, disable PWM dither. What dither does is quickly fluctuate your PWM output of that channel so that the motor isn’t in a “fixed” RPM where the harmonics create resonance with the frame/bell/body. With my 4108-380 sunny sky’s, when they’re in the 70-ish % throttle range, they whine like a banshee. With very small motors I think this can mitigate some of the harmonic issues, but with bigger motors it just burns more energy varying the PWM value quickly. I built a bench tester this weekend so i can find the best BLheli settings. I’m using the 4108-380’s, cause i have excess of them (including chinese clones, so i’m stoked about burning out one of them).
So for BLheli settings, i’m finding that with lower kv motors, the lower the better. Demag off/low, timing med-low/low, no braking, low-prot off(380 vs 2300kv, not going to burn out a winding if it gets stuck), pwm input off, temp prot off.
I’m still getting some excessive heats on the sunnysky 4108s-380kv on 13"x5.5 props. The spec sheets state that the stats have a 13x4 prop, so i’ll test again with thos props(just got them today). But with the above settings I could run at full throttle the longest before excessive motor temp (esc cool, motors breaking 90C). Also got new bearings, ceramic, so going to test the 13x4 and ceramic bearings tomorrow.
I haven’t found the “perfect” blheli settings yet.
@wifiguru10 - ah interesting, my sunnysky 3508-520kv whine like a banshee as well, drove me nuts. I found changing to oneshot timing eliminated a lot of it. Please let us know your settings if you successfully get rid of the whining.
“Pwm dither is a parameter that adds some variation to the motor pwm off cycle length. This can reduce problems (like throttle steps or vibration) in rpm regions where the pwm frequency is equal to harmonics of
the motor commutation frequency, and it can reduce the step to full throttle. It is primarily beneficial when running damped light mode. Dither is not applied in closed loop mode”…
For now i will take your advice about low protection off…changing other parameters may lead to inconsistent test results…more or less its same like yours difference is bcs. i use 20" props…i think you should use bigger props too,i am not sure why you don’t use 15"
What is your ESC mid/max/mni settings in BLHeli…Did all ESC calibrated same endpoints?
my motors becomes cooler when i lower AP PIDs…
did u follow my advice Throttle Accel P half of I must be…?
Yup, my Y6 should be running 1555’s at least, but i need to add at much more weight otherwise it hovers at 20-30%. I used 13" so that i could get some “buffer” room to run auto-tune. Now that it’s flyable (default settings make it a crack addict ;P) i’m increasing my arm length by 80mm so i can put on 15" and not have to worry about clearance. The frame is a 750mm and it barely supports 15", moving to about 850 or so so i can have some more clearance and so I can drill holes in the arms for cooling (increased thickness of the 30mm tubing from 1mm to 2mm, waaaay stronger). The original arms had a crack in one of them due to the thrust/cheap chinese design.
The pwm dither is mainly for smaller high KV motors where slight variations doesn’t affect much. With my big motors, since they’re overpowered they create alot of vibrations (which is amplified by the higher PIDs I had).
Keep the same settings tho, like you said, so that the test results aren’t thrown off. One thing with the PWM frequency “low”, i watched a video on youtube that went through blheli settings (“BLheli explained”) and it said that low PWM frequency gives you less “steps” from zero to full throttle, so a small dither probably wouldn’t even create a change in the throttle. Mine is set to high, so that’s why I might have been getting hot motors because it was speeding up and slowing down very fast (with demag-on/dampening-light).
@fnoop thanks for the info! I’m going to give it a try tonight. on the sunnysky’s i’m running a 13x5.5 so it might be too much for the motor, just got some 13x4’s in so i’ll be able to re-test the settings and post the results (in a different thread, don’t want to hijack this one ;P).
It was a bit windy but this was by far the worst flight…i don know is it me or something wrong…no one answers my questions anyway…
Also two times in one flight i heard DISARM and ARM from ground station???
can’t find evidence of that in logs…but on video from my fpv camera i can hear LOUD AND CLEAR beeep…
3 logs from today (30.09.2016) are here together with others…
ONE TO TAKE A BETTER LOOK IS 2016-09-30-09-43-26
WHEN I SWITCH TO ALTHOLD PROBLEMS STARTS
Is it to OVERPOWERED?