If you are having issues with Companion: Pi 2/3/Zero development, and would like to discuss code solutions please post your topics here so other developers can assist and provide ideas. Afterall Companion: Pi 2/3/Zero is a new project with a finished idea - it is being developed with project goals that have yet to be implemented.
As of today:
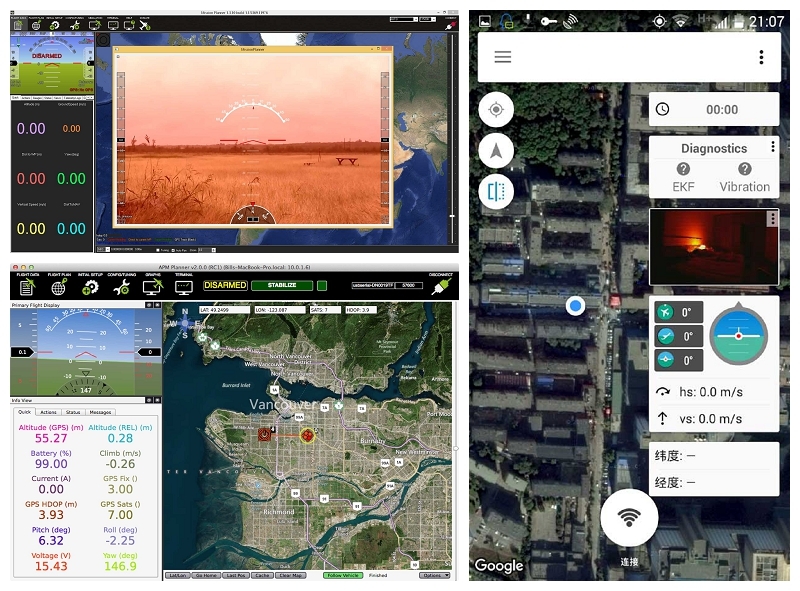
-Mission Planner has a modified version of software for video, I hope it gets integrated into the standard HUD soon
-Tower Beta has integrated video HUD which is nice
-APM Planner video HUD is in development I believe
You can of course run gstreamer as a stand alone software on Windows/Mac/Linux if you wish, but it will be better to integrate into a flight system.
This .img file is V1 of a project I am working on. It is available under creative Commons License.
This .img file is a custom raspbian image created for the Raspberry pi 2, it includes:
Raspbian Jessie
Gstreamer
Mavproxy
SSH Enabled
Pi Camera enabled
Disabled O/S control of Serial port
Custom config.txt for performance
Static IP enabled
How to burn to SD card: -
1)Burn .img to sd card using win32diskimager.exe -
2)Boot pi2 -
3)Connect to your wifi network to aquire ip address -
4)Shutdown pi2 and unplug keyboard/mouse/screen, restart pi2 -
4)SSH connect: 192.168.1.3 port:22 - username:pi password:raspberry -
5)run mavproxy & gstreamer with settings as you wish (or use my settings) -
I hope to add more features in future once the groundpi2 is complete, there will not be a need to setup IP. -
Hi
I’m after a little bit of help please.
I’m trying to understand how to set up port forwarding on a raspberry Pi - wlan0 to wlan1. I’ve googled port forwarding/raspberry and end up with info on how to configure routers and connect with a raspberry pi. I would appreciate if someone would point me in the right direction.
What I’m trying to do is have a Sony QX100 camera stream liveview/control data to a raspberry on wlan0 then forward via wlan1 on 5.8Ghz to a Ubiquiti Nano M5 acting as an access point. The Ubiquiti is connected to my laptop via ethernet.
I currently have pysony ‘https://github.com/Bloodevil/sony_camera_api’ working on my laptop via an Ubiquiti Loco M2 which links to my sony Qx100 . With pysony I have access to all the camera controls and view liveview via Patrick Duffy’s HUD via Bluestacks. Unfortunately this current setup only gives me approx 140yds using 100mW total output power.
Thanks
For some reason, on my Jetson TK1 (Ubuntu) - can’t get UDP stream displayed on there. I tested on my Ubuntu Laptop as comparison, and it streams just nice. So I guess it’s the Jetson that’s the issue.
So far my results with gstreamer are (Systems as UDP receivers/Clients): Successful:
Windows (x86/x64)
Ubuntu Laptop (14.04)
Android (Both Tower & QTgstreamerHUD)
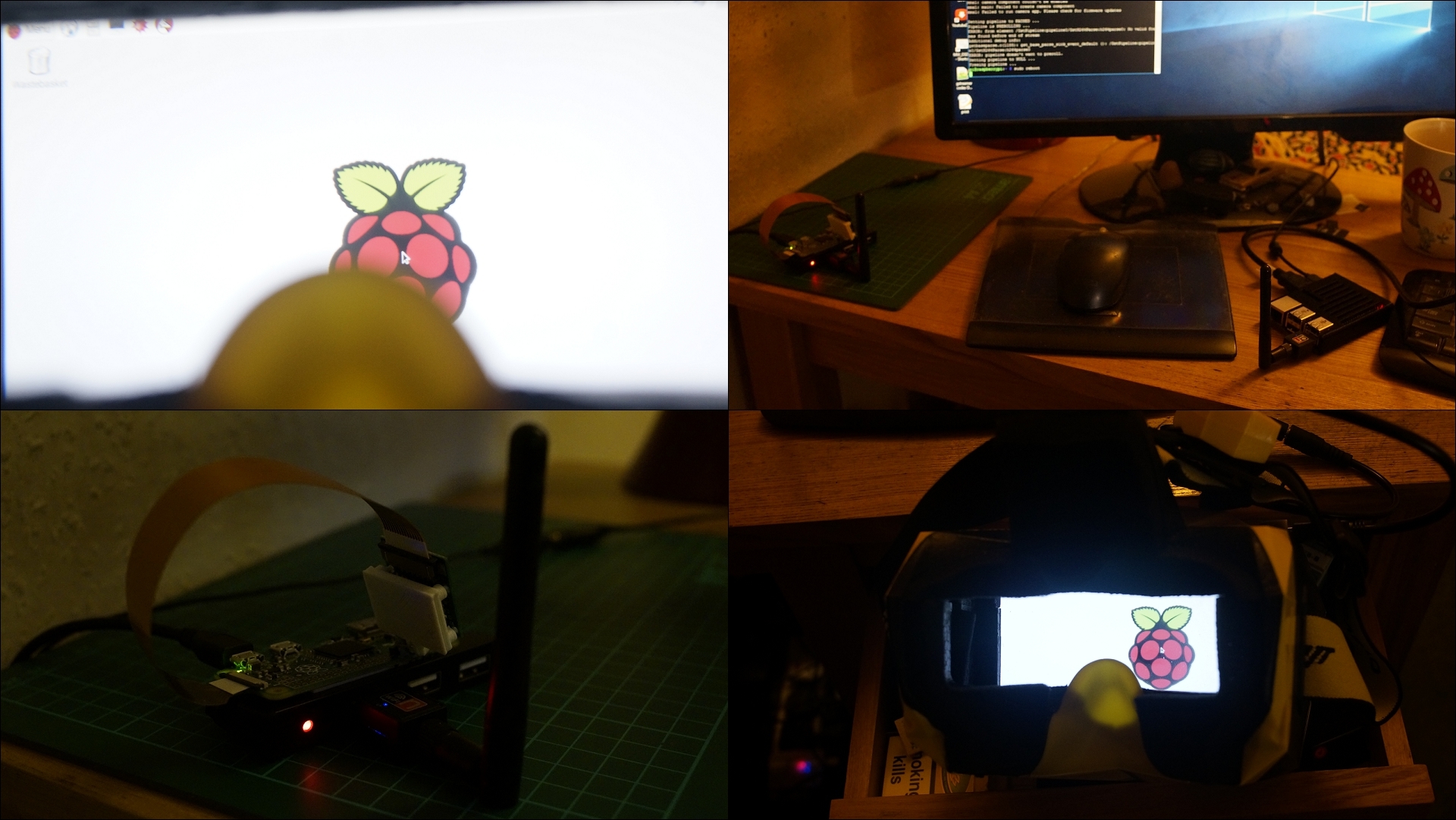
Pi2 with Jessie Lite (hdmi to HD FPV goggles)
Unsuccessful:
Jetson TK1 (Ubuntu)
Pi2 with Jessie Lite (hdmi to HD FPV goggles) (Now working see newer posts)
I’m really trying to get a Pi2 or Zero client working for my goggles, just for proof of concept.
The issue with Pi2/Zero as Client/Receiver is that OMXplayer prints command line “have a nice day ;)” and back to command prompt. Using standard gstreamer UDP client pipeline code does not open a video window either. Maybe it’s Jessie Lite as it lacks desktop environment? So I will try Full Raspbian, then Ubuntu mate…
Some good results I’m getting on the whole, really happy.
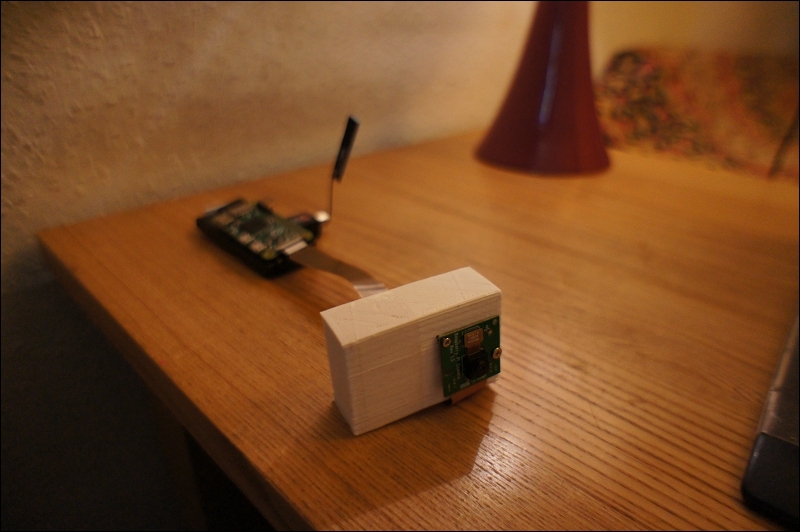
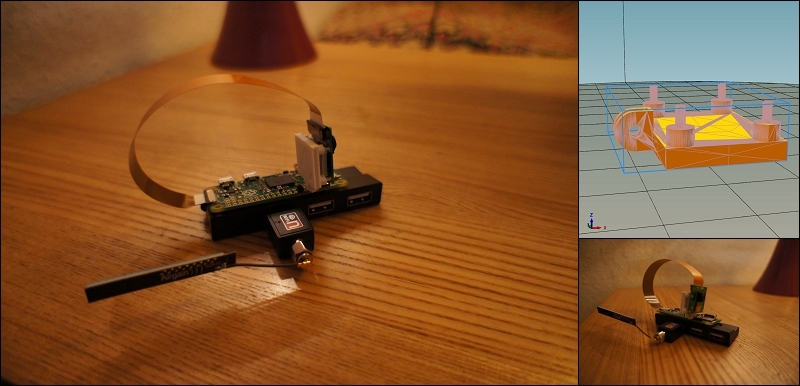
I’m comfortably using a Pi Zero 1.3 as the camera feed/server with no issues whatsoever on any system.
I’m using a pocket/dongle wifi router for ssh connections and video feeds between client + server. Works really well, and I’m enjoying the customisation of the router. Unfortunately Openwrt isn’t yet built/compiled for Pi Zero, so Pi2 is the way for Openwrt router.
I’m going to try pi zero 1.3/Pi2 with Full Raspbian or Ubuntu mate to see if those work on my goggles soon, fingers crossed, advice and experiences please.
Tiny 3-axis pi camera gimbal in my head… 3D printed mount parts, hollow shaft motors (EMax 1806 450KV 20g each).
Potential to be 80g 3-axis gimbal including 1080p/4k camera.
I’m running into a bit of an issue with my serial connection. It seems like my pi is able to open a one-way communication path to the pi. When i run mavproxy.py, i get a return that the UAS is in stabilize mode, and “fence breach” and “online 1”, but it doesn’t do much else, or respond to commands. Any help? running a PI 3 and 2(tested both) with direct connection to the telemetry port on an APM 2.6 via GPIO on the PI.
hi, it sounds like you’re having trouble with mavproxy. Most people have it running smoothly with apm 2.6 and once wired correctly, it should display data in ssh.
benbojangles do you have your scripts available anywhere? They don’t appear to be on git. I’m having trouble getting a reliable stream from rPi 3 to rPi 2 using Pi cam with gstreamer over UDP. I can get a good fast video stream when receiving on Windows with gStreamer, but receiving on Pi isn’t as successful. Maybe something wrong with my version of Jessie and gstreamer.