HI,
We did more than 100 flights with auto take off with a bungee without a single problem, using the pixhawk 1 and the 3.7.0.
Lately we have upgraded 3.7.1, we did the first fight without a single problem, file 103.BIN. Before the flight AHRS orientation was always correct, external compass was not (once). We set primary compass to internal at that time.
The parachute landing was a bit tough with the parachute due to strong wind, we lost the stopper of the folding propeller.
We tightened the propeller very well without the stopper and we tried to do the auto-take off with the bungee, but the plane went very stiff vertical and then it tried to stabilize itself but then we opened the parachute but it was too late and it crashed. file 106.bin
We did a new plane with a new AP and an APC propeller, we did all calibration and we checked all the surfaces before flights and everything was OK.
we tried a simulated “takeoff” by setting takeoff altitude to 2 meters and raising the frame in auto mode; it completed “takeoff” and leveled off.
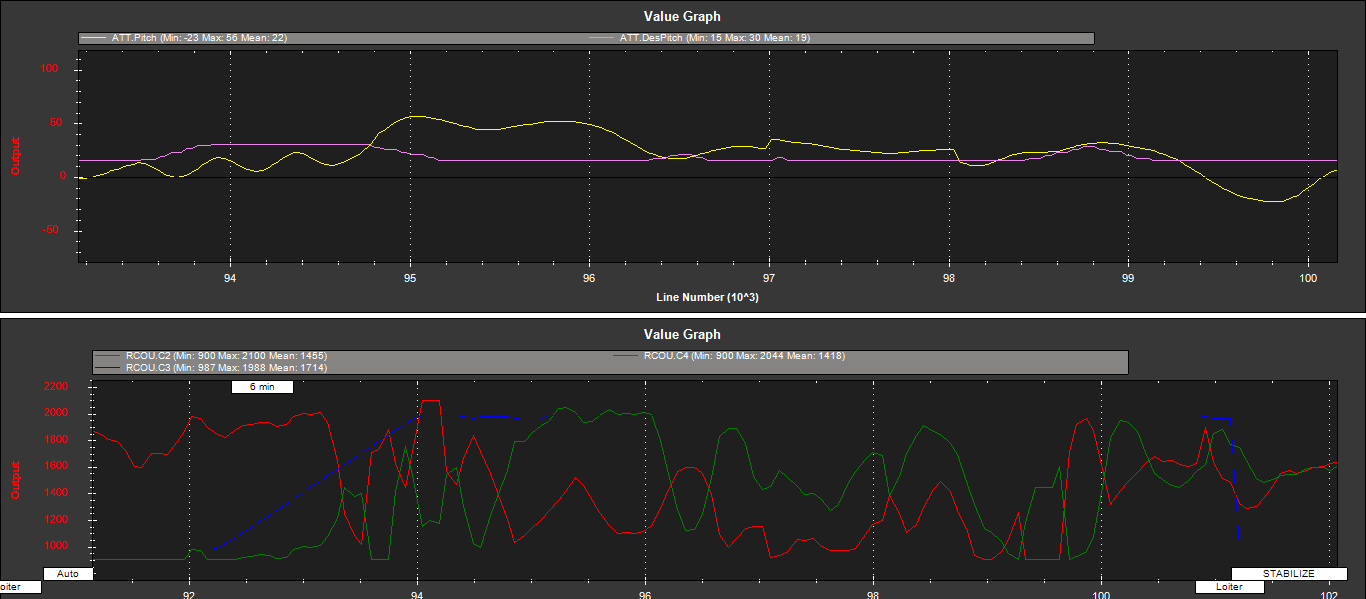
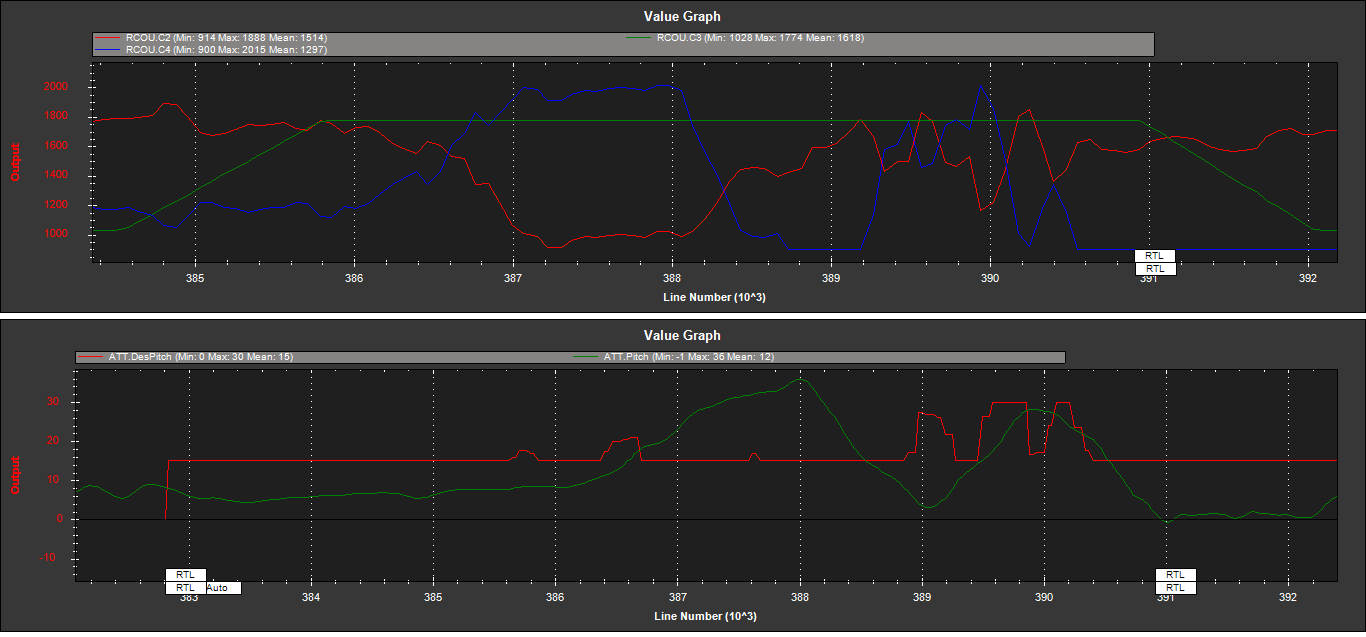
But upon real takeoff it kept climbing and tried to do a loop and then a crash.
And if you see in the log, pitch is past the takeoff angle but NAV_pitch does not level off. 24.bin
We need please to know what is the issue, because all our flights and take off with bungee are the same for the last 3 years.
The only changes that we did was some extra mission with Do Landing, the first time with parachute 106.bin and the second time auto belly landing 24.bin .
Version
3.7.1
Platform
Plane V-Tail
Airframe type
Fixed Wings V-Tail Talon
Hardware type
Pixhawk 1 with arduplane 3.7.1
Logs
24.BIN https://www.dropbox.com/sh/ilsddb3sblkmiay/AADUzUe-PCc0RcvHwg0-vHXNa?dl=0
106.BIN https://www.dropbox.com/s/ybwqqsjsah5h47u/106.BIN?dl=0
103.BIN https://www.dropbox.com/s/mq27vez3yt2bgf8/103.BIN?dl=0
23.bin https://www.dropbox.com/s/veo1u6m39n6laoi/23.BIN?dl=0