Hi Everyone ,
I am working on validating simulation tuning against flight data. i have created a step input on RC TX mixer ( i.e 6 degrees pitch) what i found out that the quad cames back to zero degrees ( stable ) when i keep the step input for a longer time.
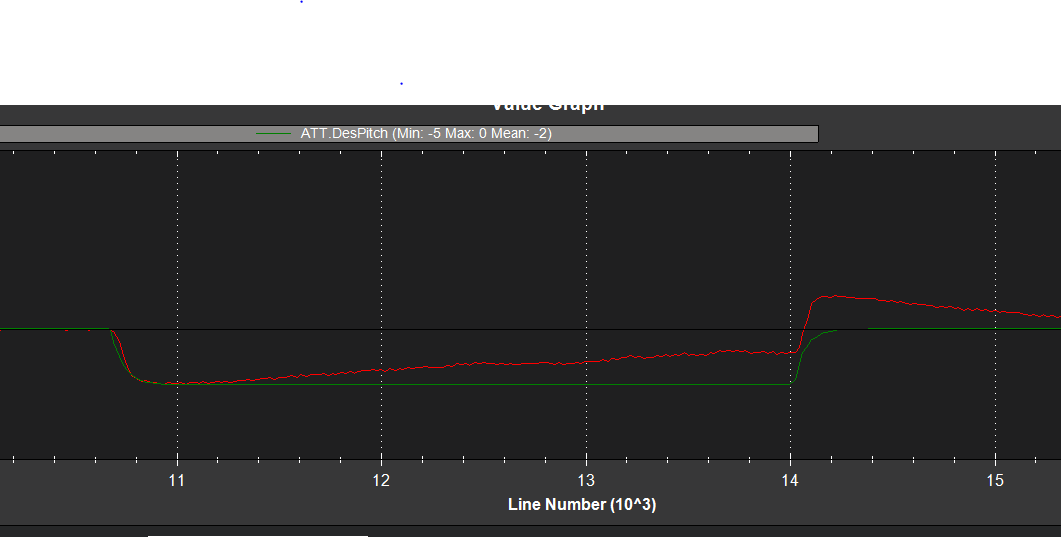
the green lin is Step input ( DesPitch = 6 degrees)
the red line is response ( Pitch)