This post is somewhat related to my other crash with a similar drone.
Long story short:
7.4kg AUW
Quadcopter using tarot x680 Frame
DJI e1200 standard tuned propulstion system
17 inch carbon props
CUAV x7 PRO with CUAV neo V3 PRO.
Turnigy Graphene 6s 12000 Mah Battery
In the post i mentioned earlier, a similar quad using t-motor motors and esc crashed in what i believe it was an esc desync.
This time, the drone just flipped mid air and fell, no oscillations, no nothing.
The quad was in auto mode doing the mission it done several times before in a successful manner.
Could someone point me in the right direction in finding what caused the crash?
Ia it possible there is something wrong with my flight controller? It is the same one that failed in the similar thread I posted a while back. The only reason I switched from Tmotor to dji was to prevent something like that from happening again.
Either that, or i am incredibly unlucky when it comes to motor - esc choices
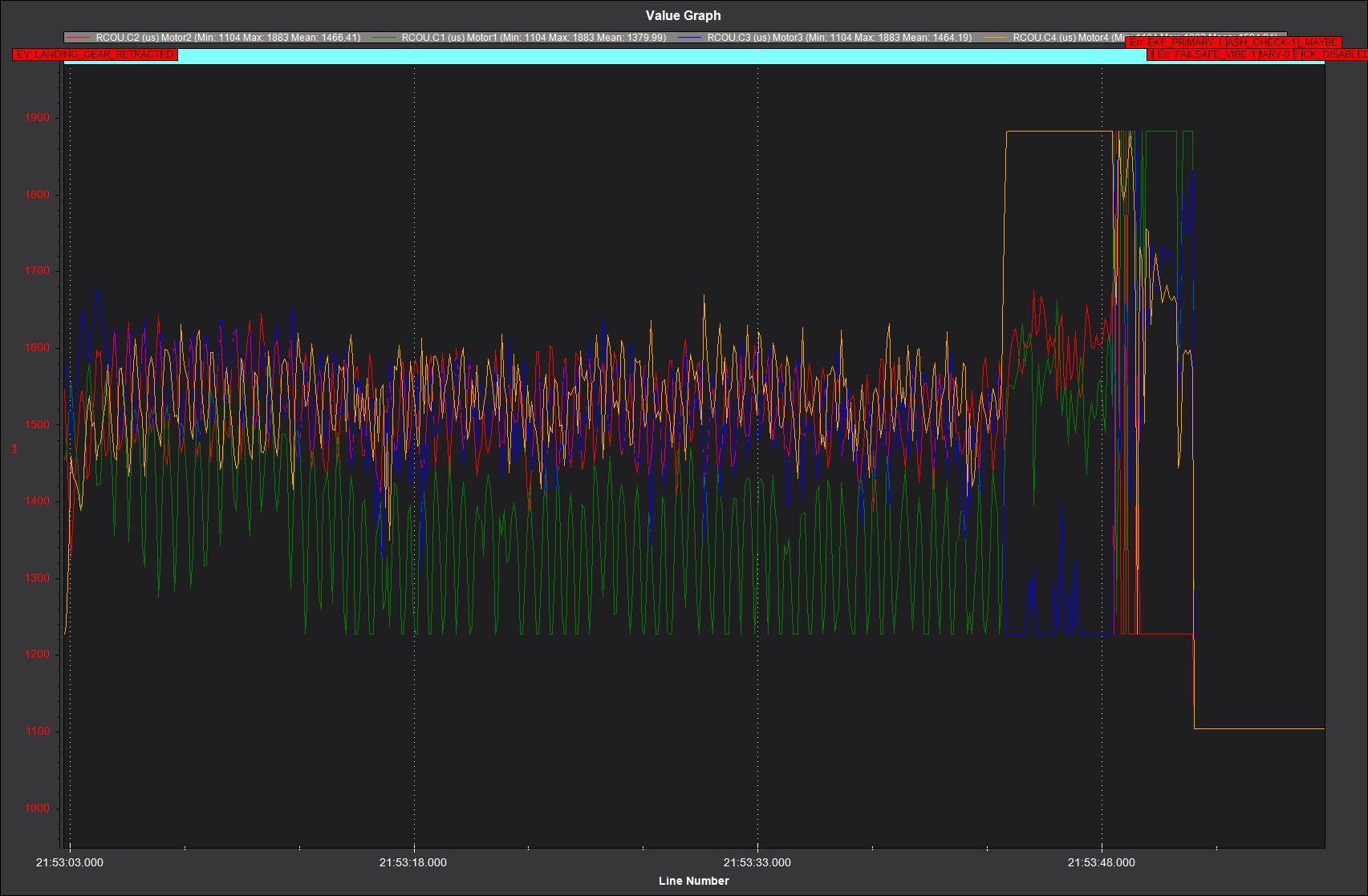
motor 1 is almost at idle compared to the other 3 motors, that is usually a weight distribution issue.
Are you connecting the ESCs directly to the flight controller, if you are routing the signal through an extension or PDB then it could be picking up interference.
This is why I said that you should look at ESCs with telemetry because if there is a failure there is no way of knowing what happened from the logs without it.
After checking the log in detail, i see that motor 1 started idling after reaching the second waypoint. Before that, all 4 motors had the same averages ( around 1500).
On the test bench, after the crash, all motors and esc-s are working as they should.
Indeed, ESC telemetry would be ideal. I will look into it.
Since we last spoke I had 2 other crashes using alpha esc-s. In all the cases, the quad behaved the same: during mission it started to wobble then fall to the ground. I have put all my tmotor esc-s aside since then.
I ordered APD 80f3 esc and I am looking into esc telemetry setup. Could you please give me some info on how can I set up telemetry for a quadcopter using ardupilot? I don’t know where I should plug in the ‘t’ connector from the esc. Should I connect it to ground as well?