Hi @bnsgeyer ,
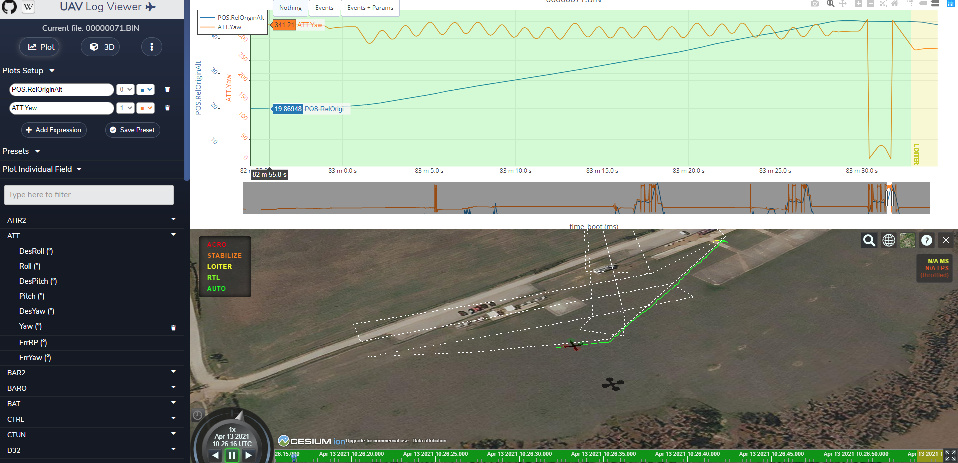
I am adjusting a heli and it is not bad, but i have some questions: #1 in the yaw turns of the WP it does oscillate sometimes.See image below and videos:
@Loren_DS I have a lot going on with preparing for the ardupilot conference and personally. I briefly looked at your data when you first posted. I think I remember that you had a lot of rudder input used to hold a stable hover. I would suggest centering your servo mechanical throw around the hover rudder requirement. That is all I can come up with at this point and I’m not even sure that will fix your issue.
Hi @bnsgeyer,
I think the centering is correct since in the acro, stabilize, alt.Hold and loiter modes it works perfectly.
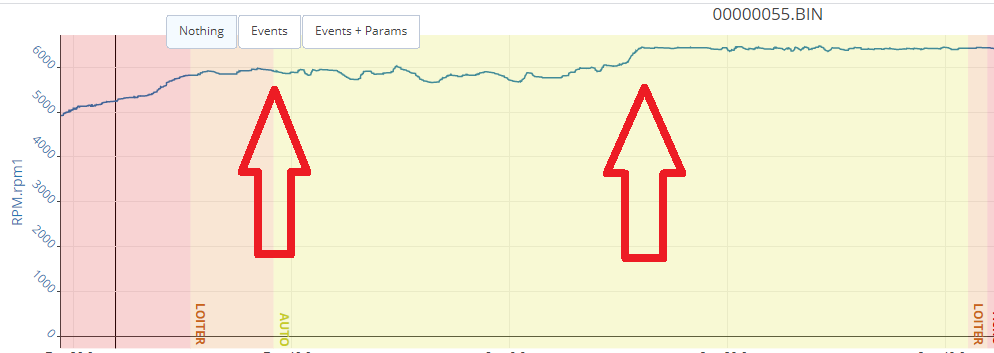
I have done some tests again and doing climb up you can see how the tail is making many oscillations.
The climbs at Auto mode are at 53m 25s to 55m 04s and second climb 83m 0s to 83m 32s.
Thanks in advance.
Hi @bnsgeyer,
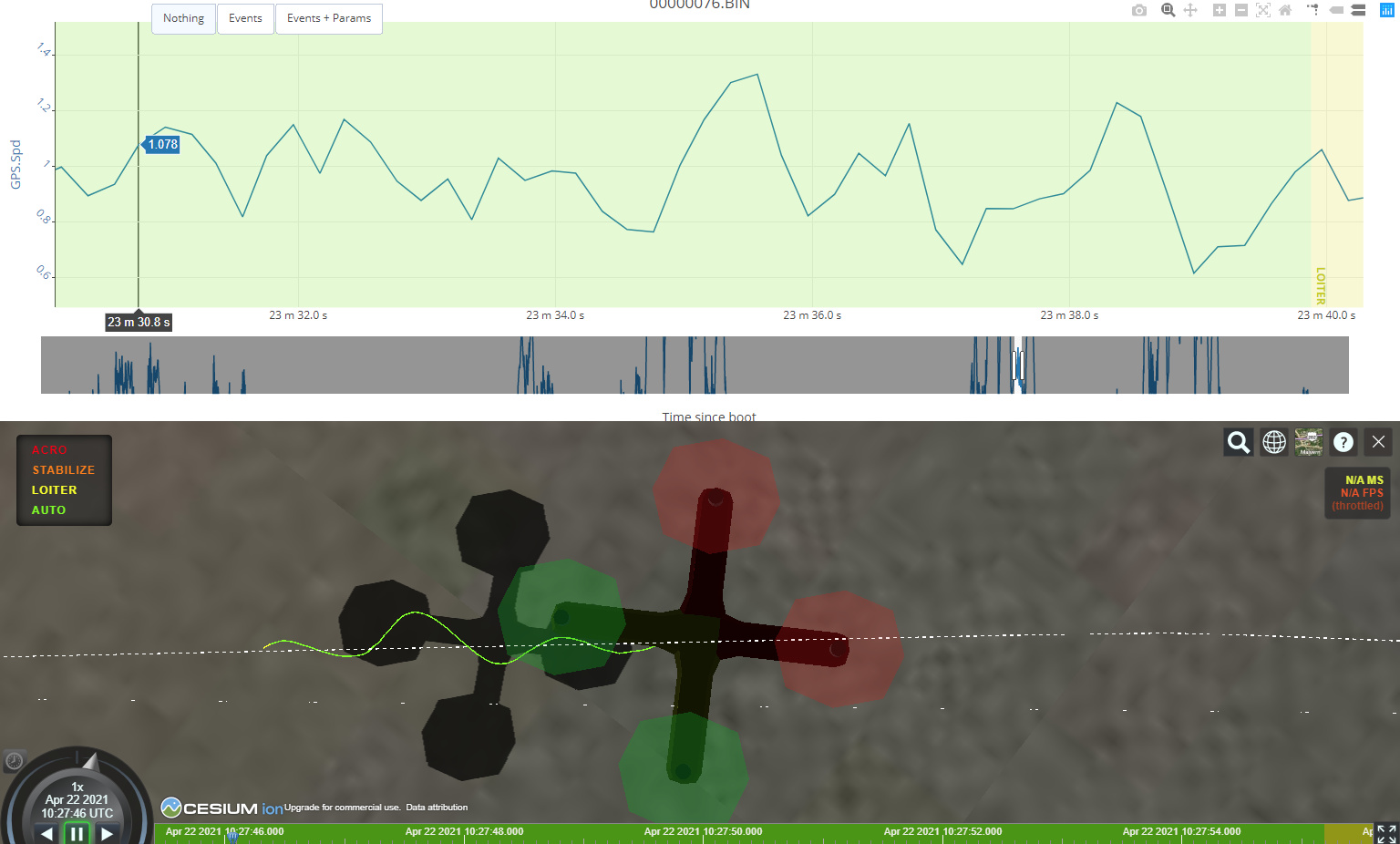
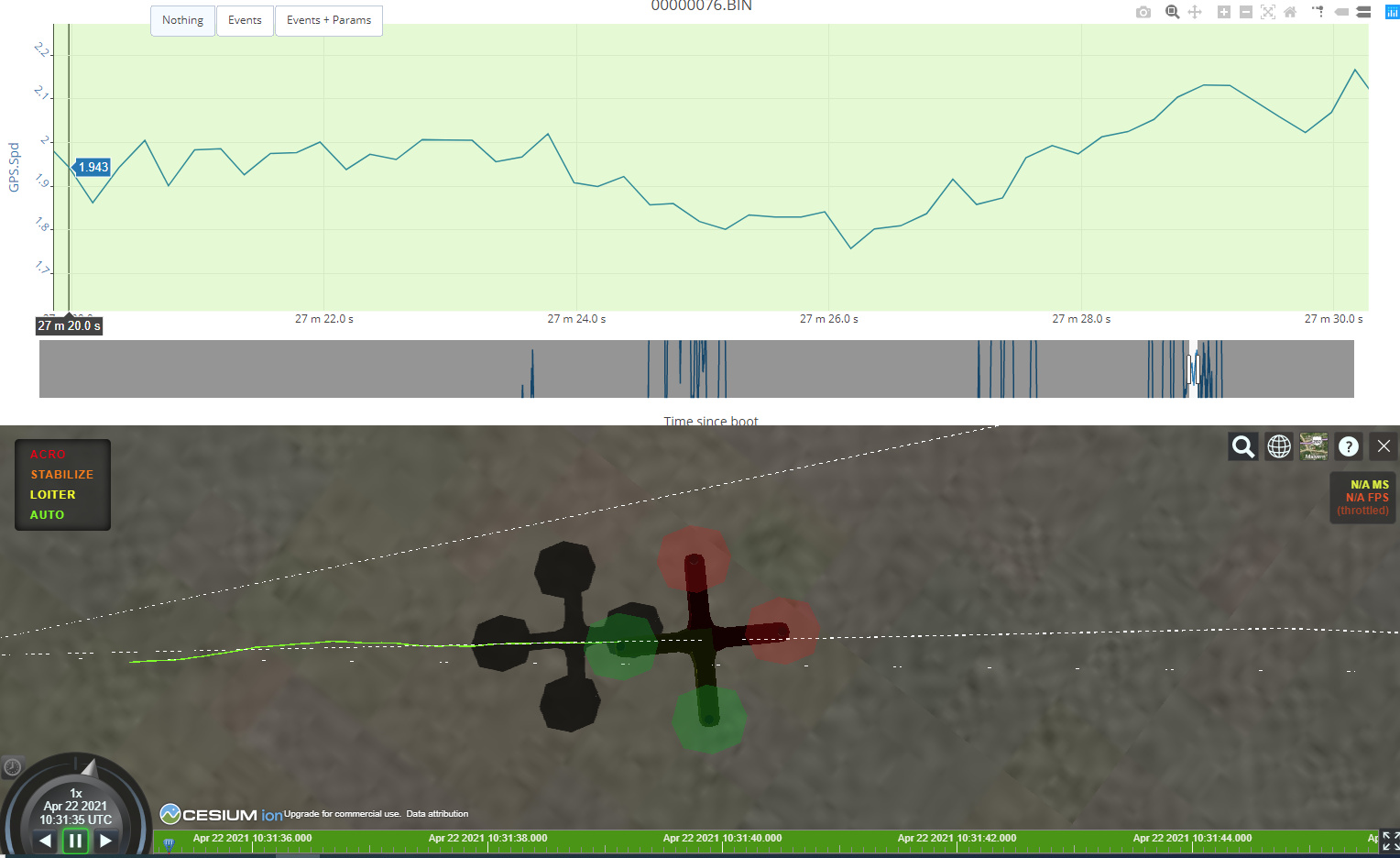
I have continued doing tests and I have noticed that if the helicopter flies at 1m / s the tail oscillates a lot, but from 2m / s the tail hardly moves anymore. The same happens when it ascends, that is, if the ascent speed is less than 2m / s the tail oscillates.
So the helicopter can’t fly at 1m / s without the tail swinging?
Is there a way to solve this problem?