Hello.
Two days ago I made two flights. In the first flight everything went ok, taking off and landing in Loiter mode and flying in auto mode.
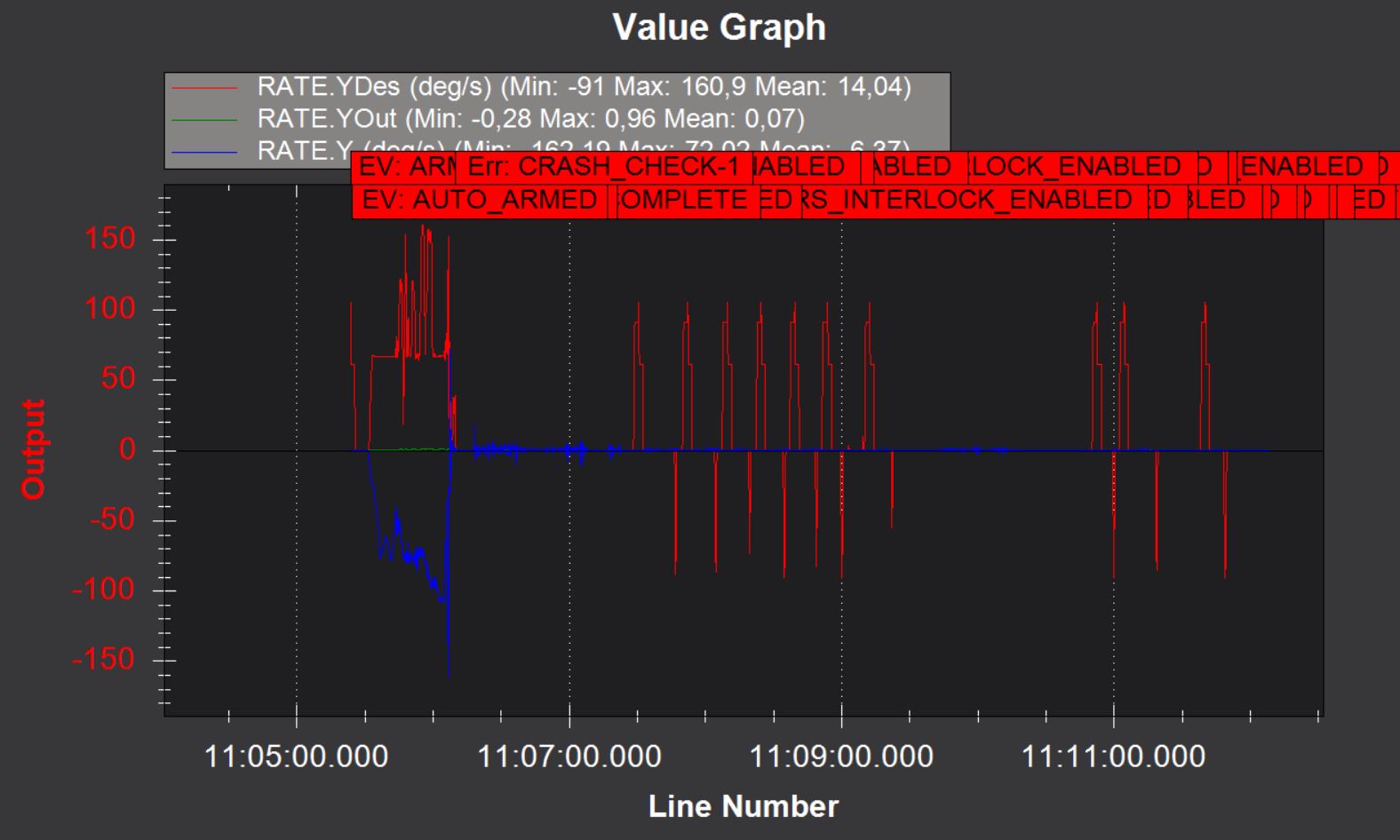
In the second flight, just after being take off in Loiter mode, the drone began to rotate quickly on the Yaw axis and could not keep it still.
From the log you see that just after take-off there is an offset on the Rate.ydes parameter.
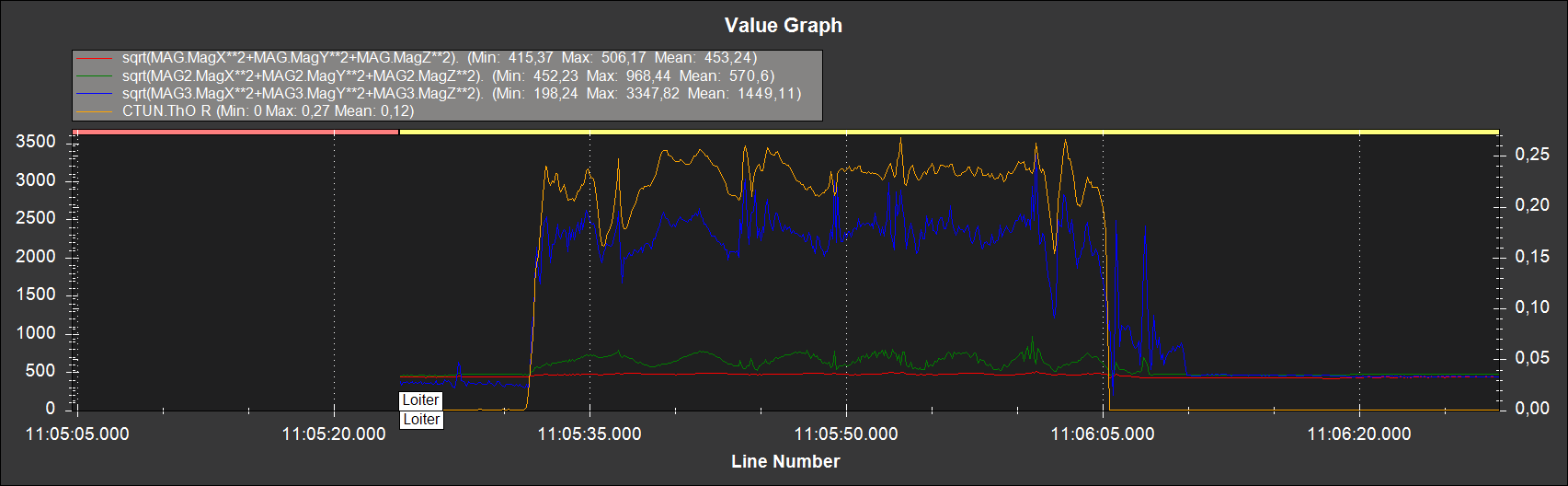
For me, although it is strange that motor 4 was very low, the FC wanted to do that, so I don’t think that motor be broken or similar. So I see two things, first that your second and third compass are largely affected by wires, motors, battery… because the mag field changes a lot with the throttle, so I recommend you to only activate the first compass and see if the problem is solved:
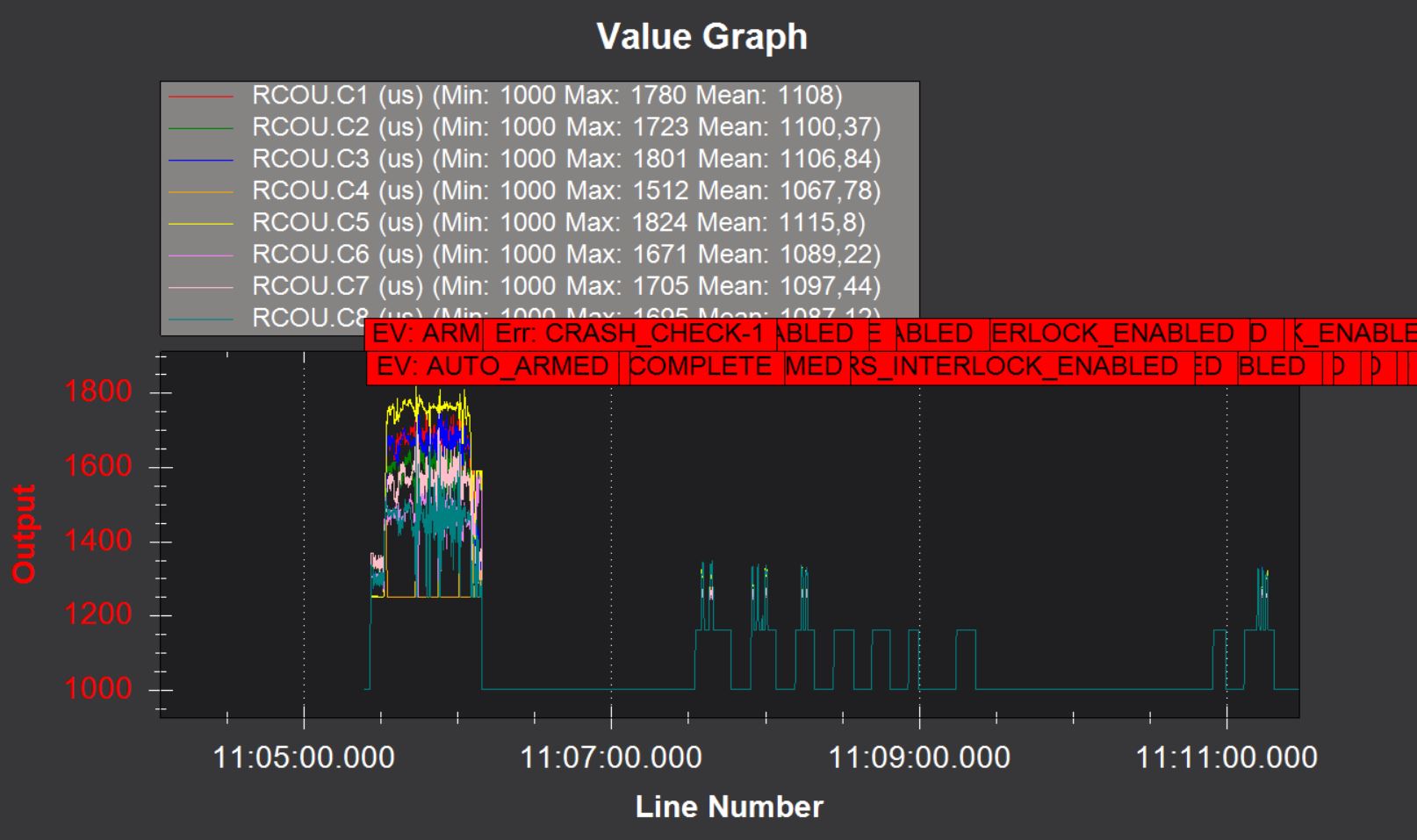
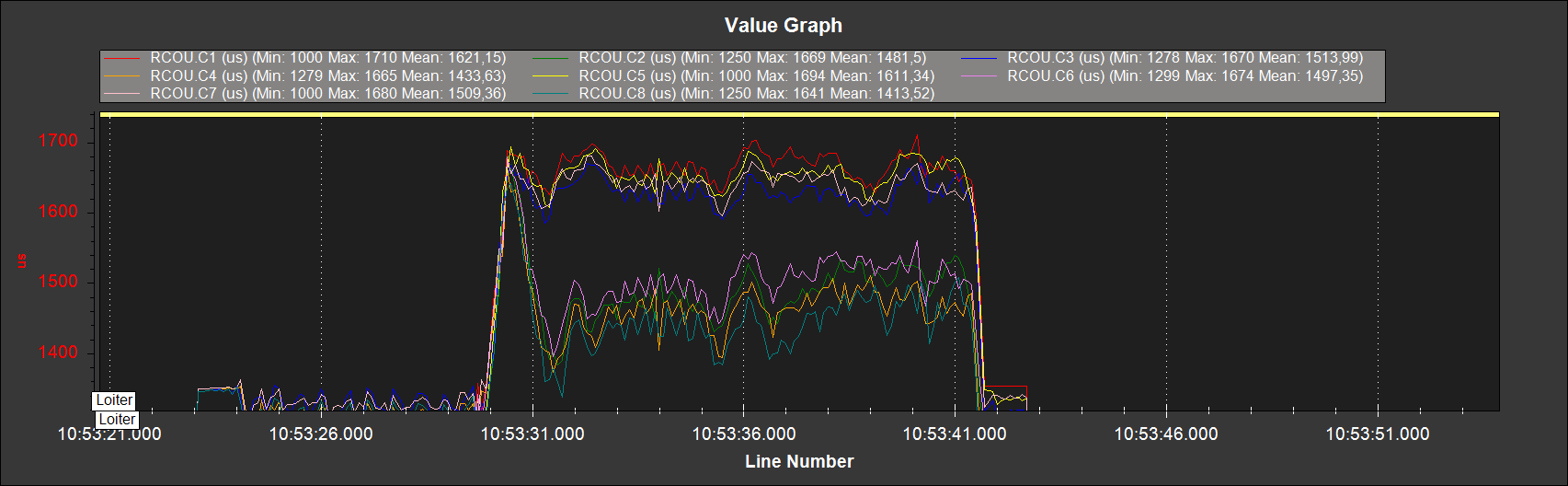
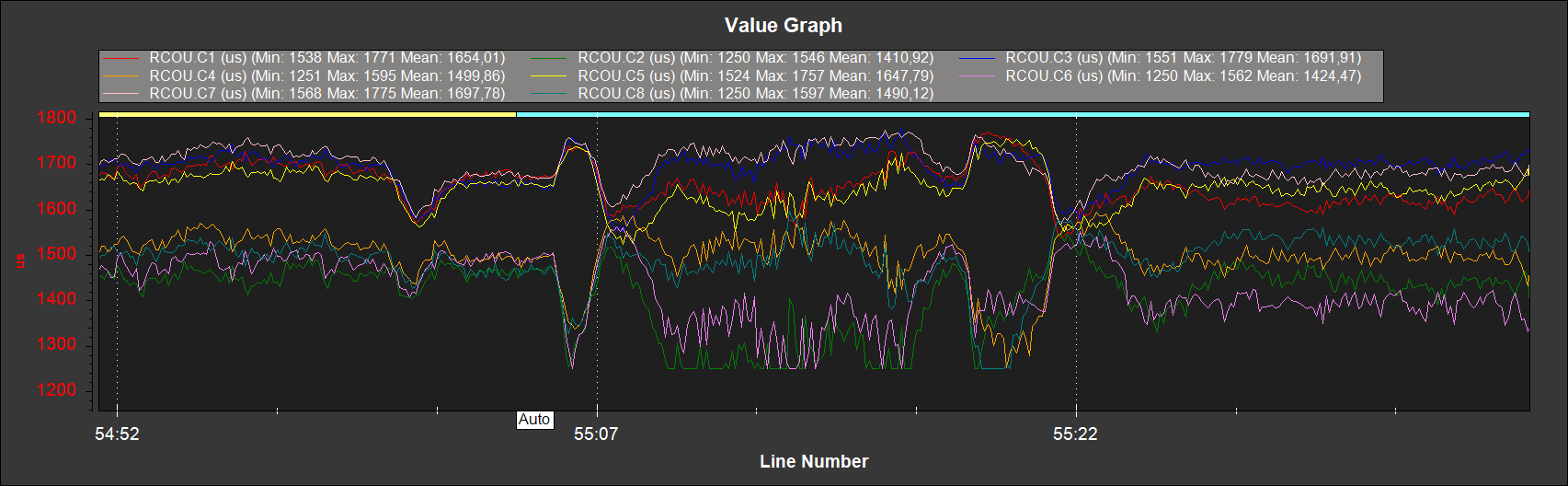
It seems you flew with a lot of wind or you have a lot of weight in front of the drone because motors 2, 4, 6, 8 were low whereas 1, 3, 5, 7 were high.
Yes, i mounted a gimbal that is not balnced very well and it pull on the front of the drone.
I will solve this problem too.
But on the second flight there is no payload under the drone, so the shift on the RATE.YDes maybe is the magnetometer interference, but i sow on this topic that maybe it is a bug:
Thank you @Yaros.
When the problem arose, the drone was without payload. So the system was balanced.
I calibrated the compass outside with 3D lock, but i didn’t do the CompassMot calibration.
So i will do that and i will use only the external compass.
I’ll let you know.
 tell me if it works after you test
tell me if it works after you test