Hi all, I’m looking for some feedback on my first build to help improve its yaw and position/alt hold control. My goal is for this build to be a very low speed, but precise and stable platform.
The payload is 2400g and mounted on a beam that runs the length of the drone roughly 12" ahead of the center of the front two motors. The batteries are mounted at the opposite end of the beam to act as a counterweight. COG has been checked and is good, although I suppose there is some room for improvement.
First flights in stabilize mode were wildly uncontrollable along the pitch axis (as expected). Manually tuning pitch rate PID values helped a lot and made it flyable. Autotuning was not an option as I don’t have the space and was concerned the batteries wouldn’t last long enough.
Yaw control was almost none existent. Again, manually increasing yaw gains helped, but it still feels like it has little authority and will overshoot and oscillate.
On a possibly related note, altitude hold and loiter position hold have not been as good as I hoped, even after adding a HereFlow camera and SF11C Lidar.
My hope was to have something that would be comparable to something like a DJI Mavic for position/altitude hold precision, but I don’t know if this is a pipe dream considering its size.
First off, I am no expert but I have spent the better part of the last year and a half building a mini fleet of heavy lift hexes, and these are my initial thoughts.
So when reading the specs on your copter I was thinking it may be on the underpowered side of things, and the really high moment of inertia is just too much for it.
The MOT_THST_HOVER value has always been around 0.193 which from my research indicates it may be overpowered. Could this be the source of my control issues?
I don’t think that value is correct since the hover throttle learn parameter is disabled.
Looking up the specs on your motors you should be hovering at just below 50% throttle.
Someone who knows a lot more about tuning and arducopter in general can probably give you some more actionable feedback by looking at your logs.
But I will give you my opinion that it will be difficult to have a rock steady platform for a payload that size with the hardware you have now (hopefully I am wrong). My target payload is 3Kg and the hex I have built around it is much larger than yours (and so far it has been doing quite well). We have Hobbywing xrotor pro x6 propulsion system with 23" props and a AUW of 16kg with 2 x 25aH 6S in series on a custom frame. Of course it can lift much much more than 3kg but stability / performance will always degrade near the max payload of a drone.
It seems like your AUW is a bit more than I would expect given your frame and batteries, I am thinking you have added a lot of mass with you modifications, maybe some significant weight can be shed there? Can you show any pictures?
18" props on a puny 5008 makes it overpropped. Yes, the motor can swing them, but is unable to accelerate them crisp enough for precise attitude control no matter how you fiddle with PID values. You lack in couple, not power. If there was a Tarot 5016 or 5020, an 18" prop could do. With the 5008 I think 16" is the most you can go to and be able to get a decent flying machine.
The Tarot T960 frame is a very heavy frame by itself. I only worked with one once, briefly, maybe 7-8 years ago. The 25mm tubes are way too big for your average 6S setup. They’d work well in a 12S 28" prop combo, with 25+ kilo AUW, but the center plates are obviously not suited for that. Old design, pretty much useless today.
Now, back to your powerdrive. With 10 Kg AUW on a hexa, that equates to 1.7 Kg per motor, for hover. I don’t think a 5008 can pull more then 3 Kg, total, regardless of the prop and the way it’s nursed to max spin. Your thoughts of having an overpowered bird are wrong, when hover motor PWM values are in the ballpark of 1650.
Idon’t think you lack yaw authority. I think you lack it on all three axis.
I don’t think so. Hover learned is disabled and this value can’t be right from the commanded motor output. As @ThePara says this is not right for a 10kg craft.
Sorry, I should have made it clear, I have hover learn set to disable on these files, but in my previous tests, I did confirm that it was updating and saving aroun 0.2. I disabled learning because it seemed to cause it to rise/fall as it updated the setting. I’ll go back to learn and save to see if it’s a higher value now.
Going through the tuning guide, the first thing is the battery monitor settings and the throttle expo values. I didn’t have either of these set, but I will now, along with the rest of the guide recommendations. Could this explain the lower than expected hover value?
Regarding Tarot being dated, I have no doubt, but this is my first multicopter build so I don’t have any opinion on this. Would you recommend something as an alternative?
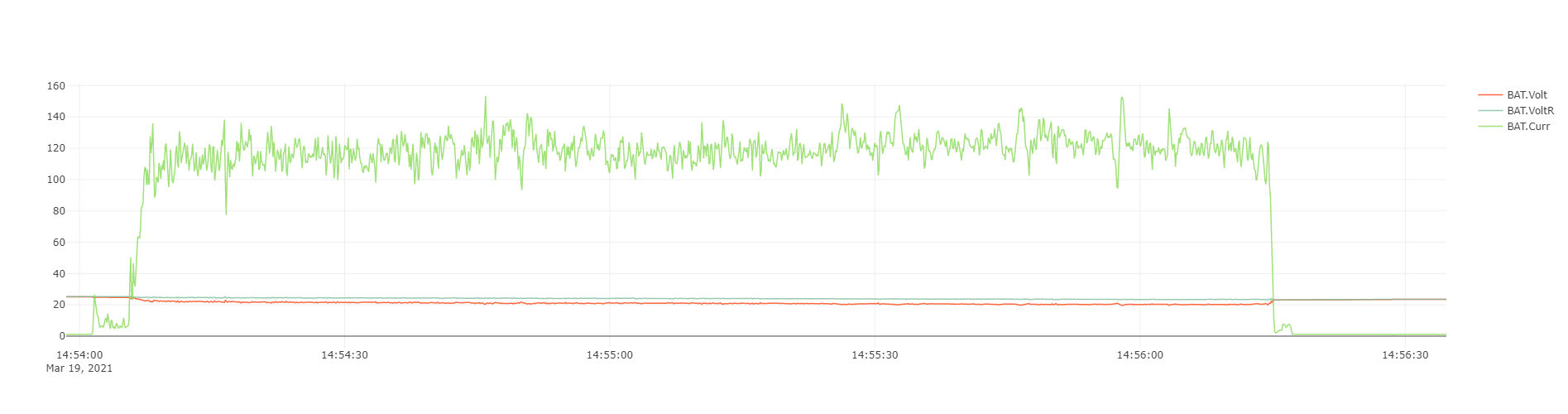
I was just looking at the components and weight on 6S. Looks like ~65% hover throttle. The Yaw tune log shows a bit below this but well above 1500us where you would want to be. That wouldn’t typically equate to a .193 Thrust Hover value. Do you have a log of just hovering in AltHold?
So this is strange. I have MOT_HOVER_LEARN set to 2 and it’s not changing from 0.2, even after a sustained hover in altitude hold mode. Why would this be?
Thank you for the spreadsheet. I wasn’t aware of it.
Regarding the pitch PIDs; the payload is way out front so these needed to be higher to get it stable.
I’m still unsure why the thrust hover value is not changing. I fixed it at 0.2 and it never updated during the entire test hover. I’m sure it would have gone to something else in that time if it was updating properly.