Hi Today i am flying my Xuav talon , running arduplane 4.2.2 latest, soon after take off the plane felt not stable and it tried going up but it felt bumpy , constantly pitching up and down and slowly .It was in a Auto mode following a small mission, but eventually it was making turns and crashed. During the final leg of crash, Error compass variance message came. Any inputs what led to the crash, might be helpful. Checked on the control surfaces post recovery all were intact. No Airspeed on this. Log
Your data logs does not contain any logs.
Duration of the flight is 1s, compass is fail to initiate, throttle didn’t go above 20%, never done any autotune,m.
Set ARMING_CHECK,1. If you’re getting errors with this when you try to arm, then fix them.
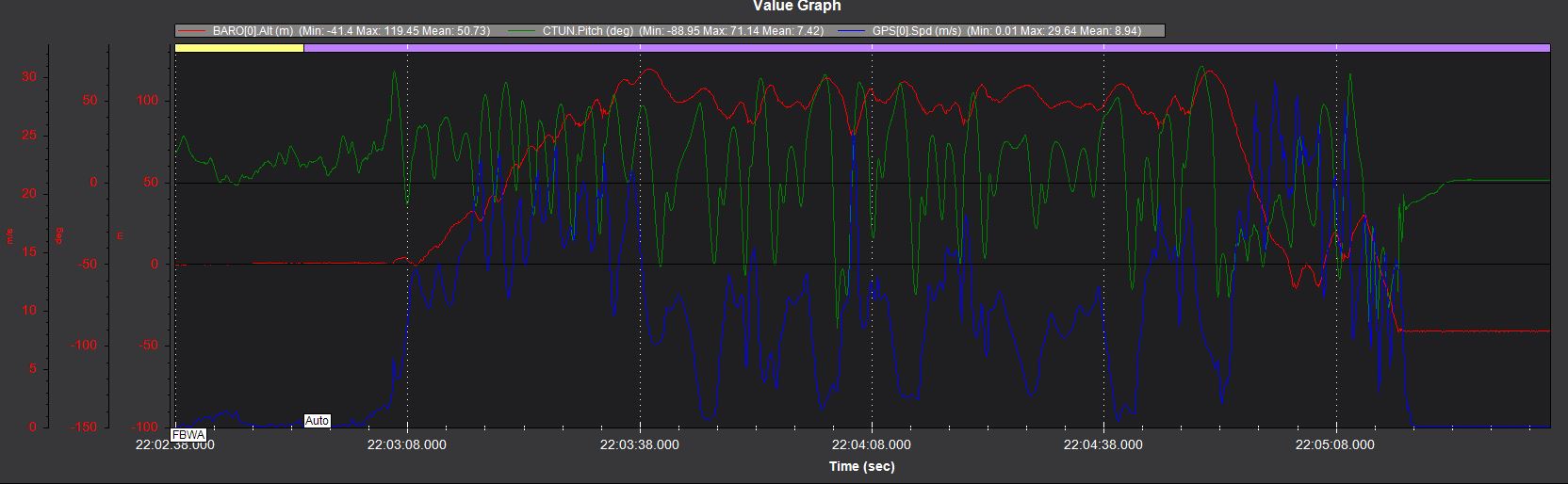
Fix the Centre of Gravity. I think that the C of G is too far aft. The continual pitch oscillations, coupled with large speed changes suggest the plane is out of trim. The plane came very close to stalling many times.
Set SERVO_AUTO_TRIM,1
Carry out an autotune.
If possible try to set up current monitoring. Won’t solve this crash, but in the long run it makes it better for battery management and troubleshooting some compass issues.