I’ve owned the PixHawk Cube for 3 weeks now, and have spent countless nights staying up way passed the time I should be in bed just trying to get “Manual” to work right on my deltawing.
I just don’t have the patience anymore, all the googling and youtube guides and forum posts…
I’m at my absolute wits end. I have never been so disappointed and frustrated in my life.
So if you want to make a quick buck, message me and we can skype/discord and see if you can help me set my PixHawk up once and for all.
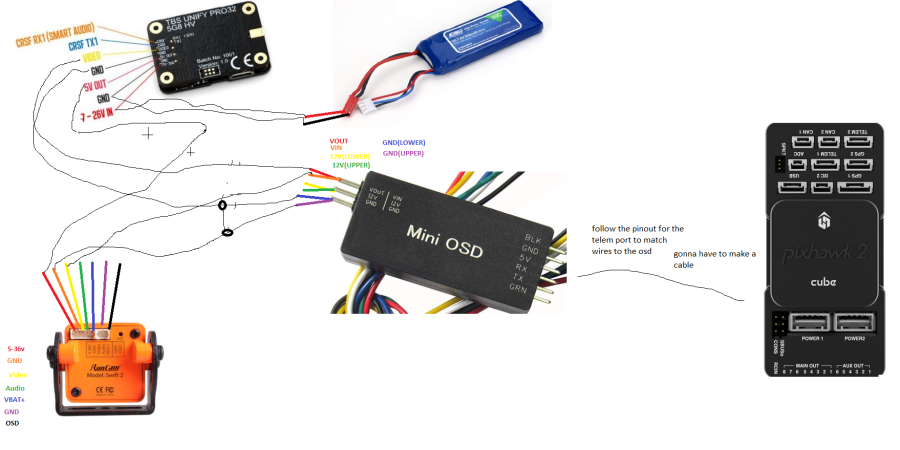
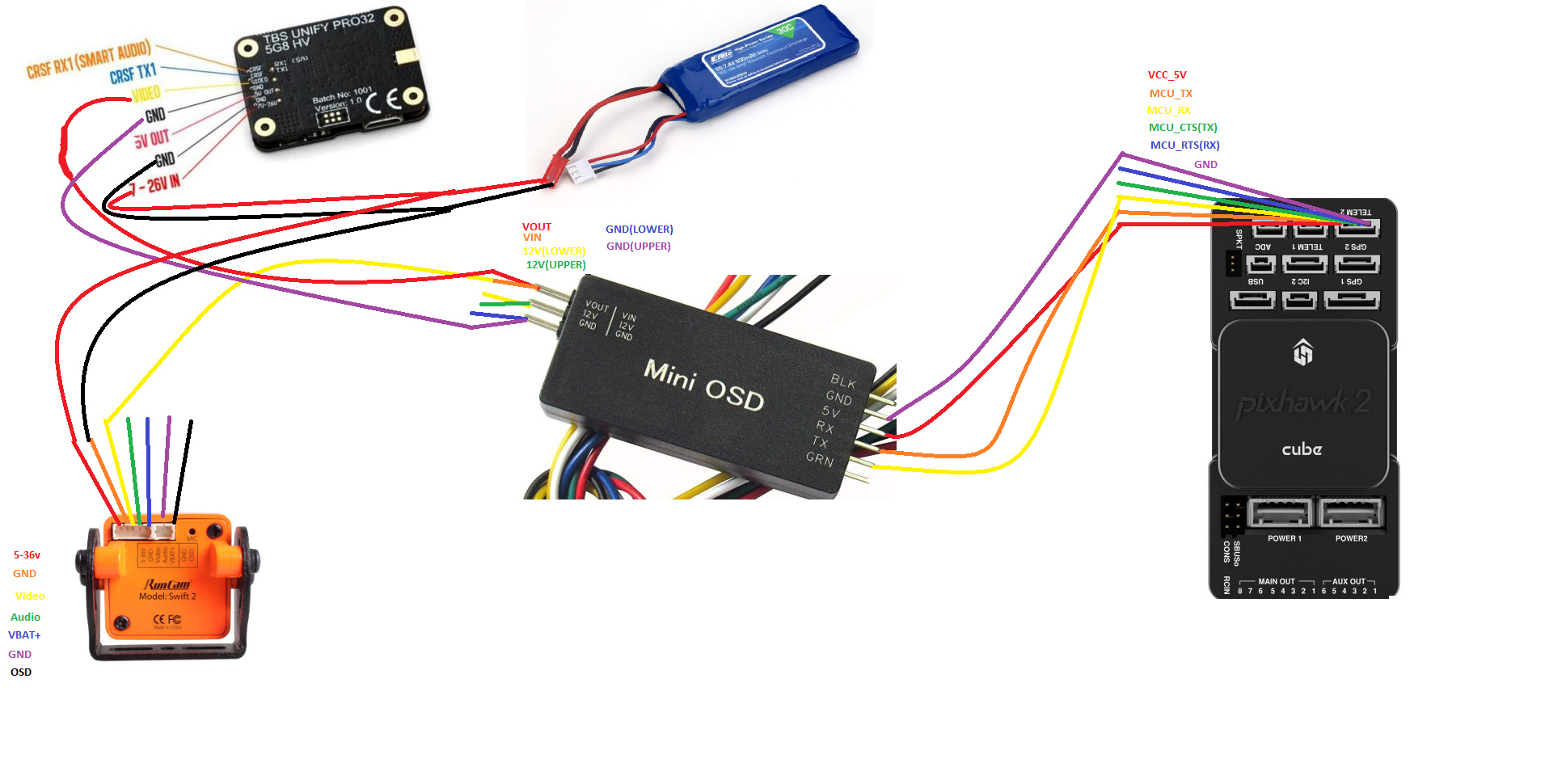
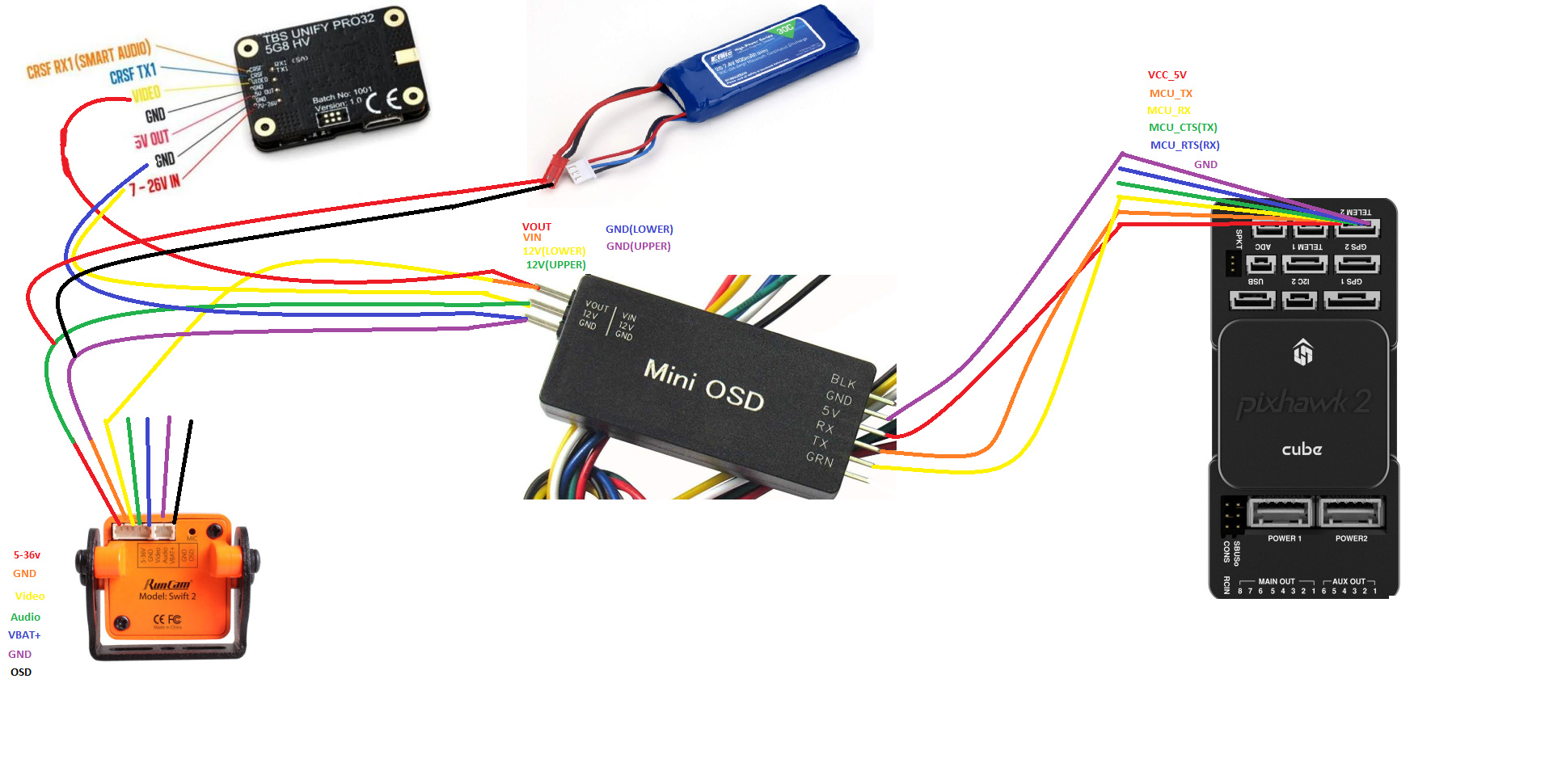
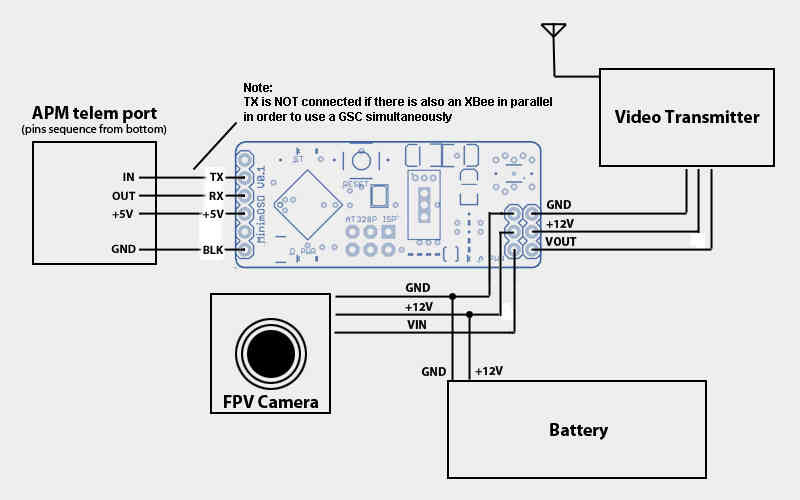
One part that is tricky and can get some people is RX goes to TX and vice-versa. It can appear to a novice that you would match up the labels, but that is incorrect. For example - the RX on the OSD goes to the TX on the pixhawk and the TX on the OSD goes to RX on the pixhawk. (I think you have it correct). the logic is that RX is an INPUT and TX is an OUTPUT. So an OUTPUT from one device must go to the INPUT on another device.
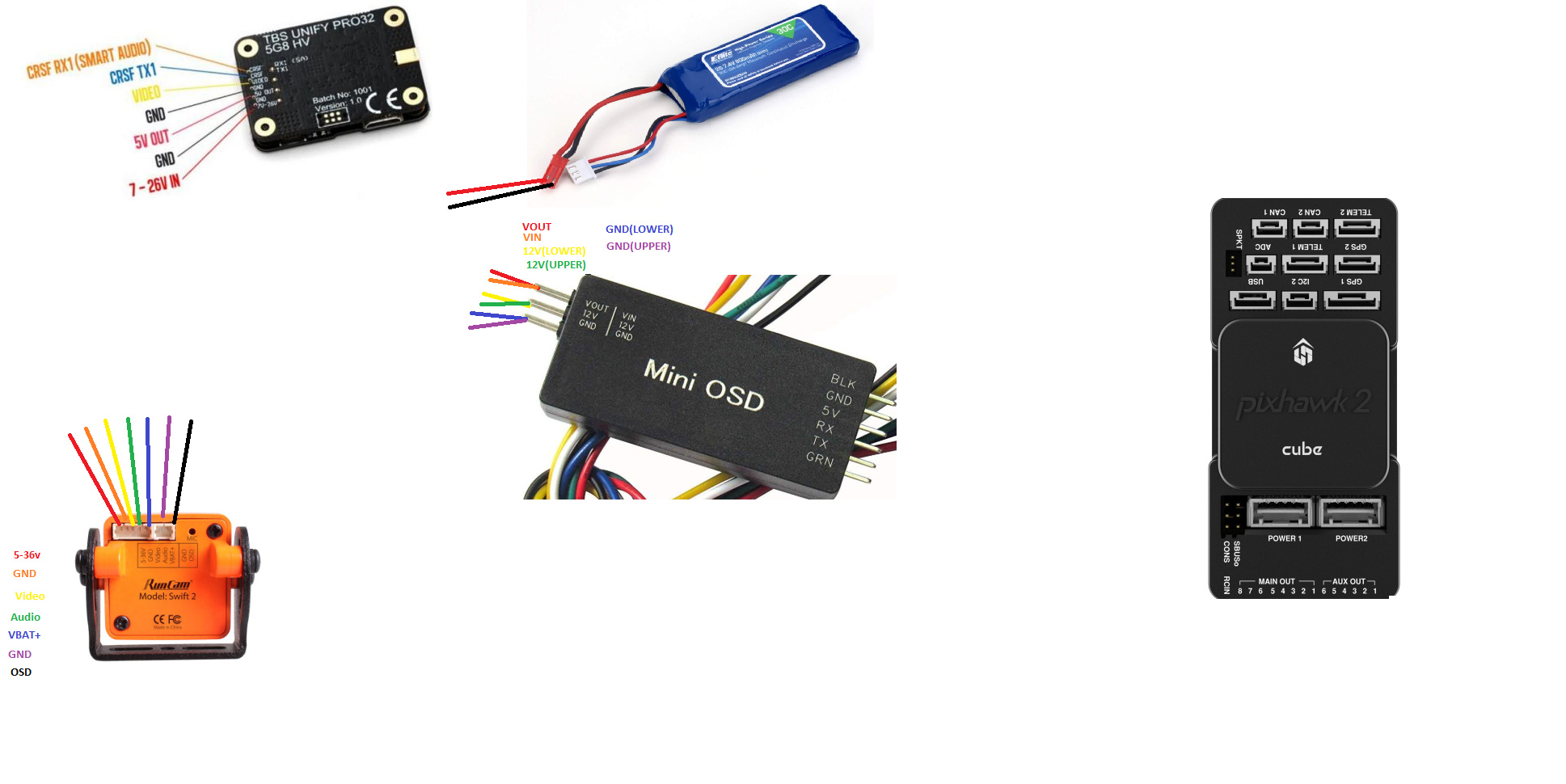
Power all three devices (camera, VTX and OSD) with (+) and GND from the battery. Thats the simple part.
Video signal from the camera goes to “Vin” on the OSD.
“Vout” (video out) on the OSD goes to the video pin on the VTX. The OSD simply takes the video in from the camera and overlays some bits of information it receives from the pixhawk’s telemetry port. So video goes in, the OSD slaps some text and graphics onto the video signal and sends the new video signal with added text and graphics to the VTX.