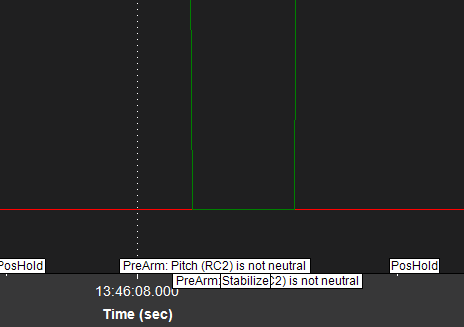
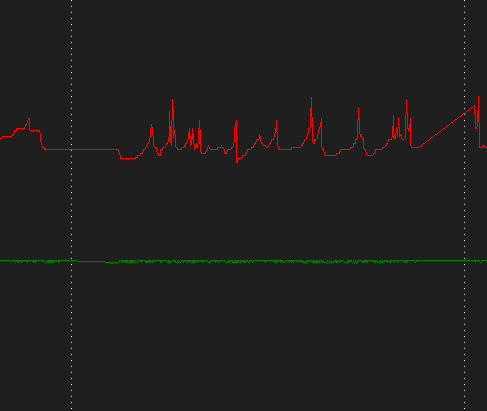
mRo R15 with Arducopter 4.2.1 heli (now updated to 4.2.2 ) in a TRex 500 heli. I took off close to our pits area in Stabilise mode, then after 1 minute set down and disarmed the heli in order to establish a new Launch point. After the rotor had stopped turning I armed it again (zero throttle and full right rudder) but just got the “uh-oh” sound from the buzzer. After switching modes a few times and disarming and arming again, I gave up. About 30 minutes later, I re-installed the battery and tried again, and it flew normally. Attached is a link to the log file from the flight; can anyone see why I couldn’t re-arm after the first 1-minute flight please?
Allan, there should be little checkboxes just below the graph area, like “messages” “errors” and so on. Do you have frsky gear? I would recommend it, as you can have a mini GCS on the display of a Taranis/ Horus radio for example. You can also edit parameters directly from your rc. Having the mini GCS will stream all the Mavlink messages and will tell you exactly what’s going on your heli, real time. It’s a great situational awareness tool!
I’m using a Taranis X9D+2019 transmitter, but I’m not familiar with GCS. When I Google it I get loads of stand-alone units, some of which seem to be very bulky and expensive!