Hi! I would like to ask why my PID gains changed after I arming my motor? The situation was I tuned the PID gains while disarming to make the compensation elevator degree between -5 to 5 degree, but the degree changed to -10-10 after I arming and the gain value was same.
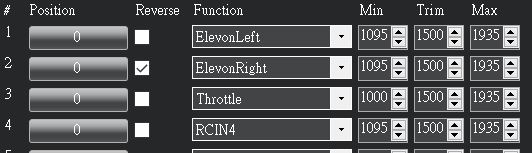
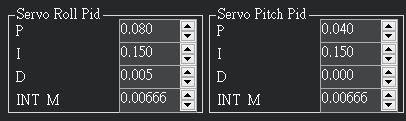
I use pixhawk cube orange+, and the version of Missionplanner is 1.3.77, ArduPlane is V4.3.0, and below are the parameter which I set.
Update mission planner to the latest version.
Also double check you were connected to the drone when you made the changes. If you make changes in mission planner but aren’t connected then they don’t stay.
I always connected my plane with the Mission planner while set up. Also I will try to update my MP’s version, thank you!