Hi.
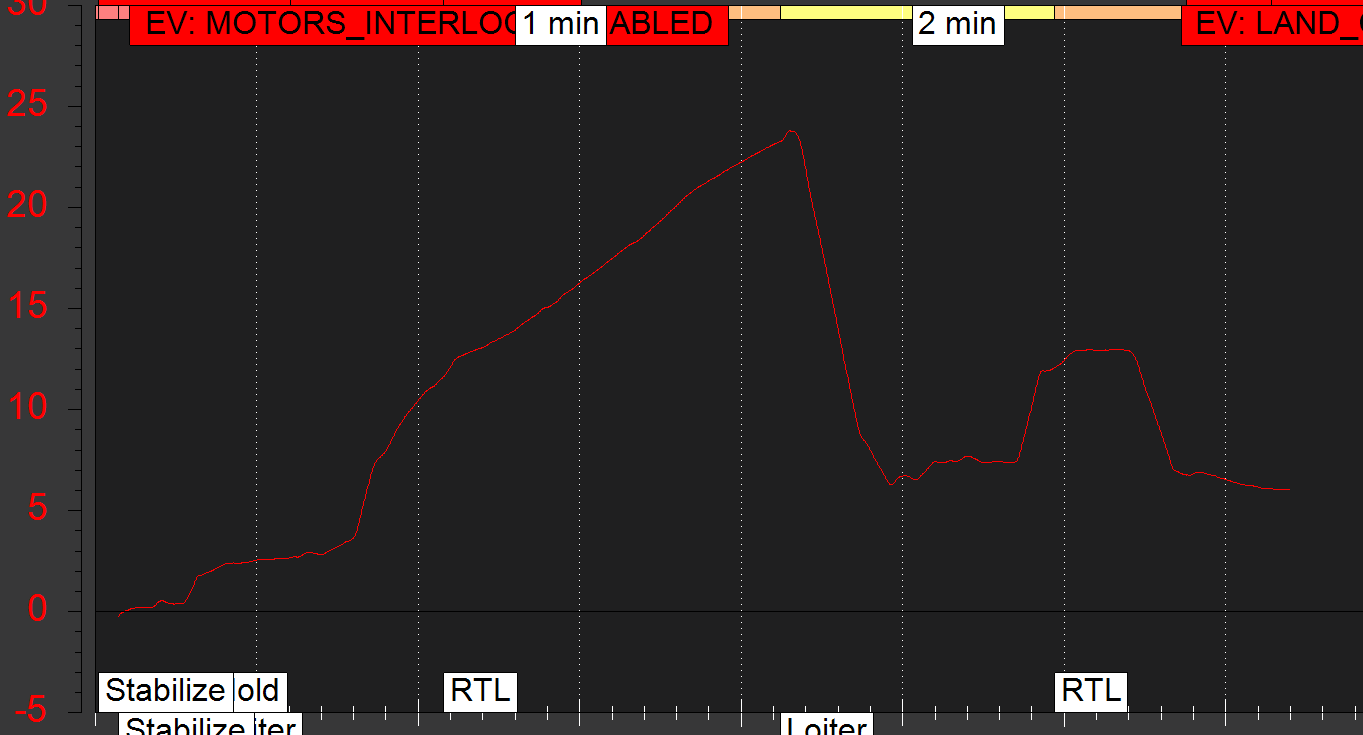
Yesterday i was strange situation. After change mode to RTL, copter move to Home point and go UP, not down to land. I changed mode back to Loiter, go down and try the same then all was good - fly up to setpoint 12m back to Home and landed. I using RTL from long time and never had a problem.
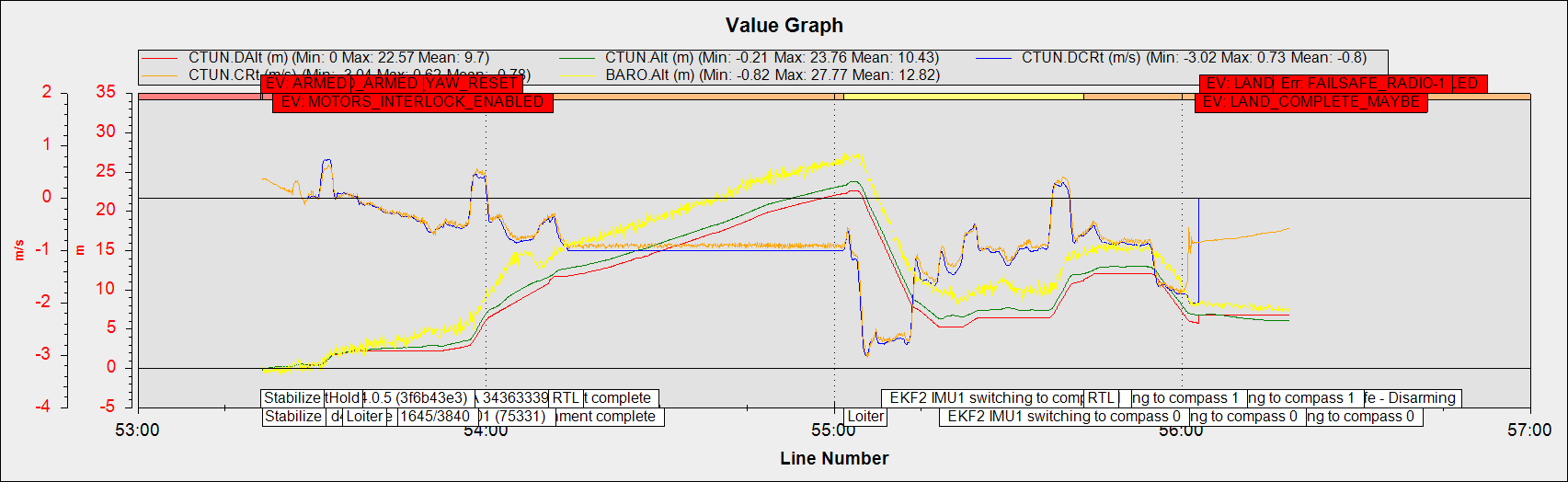
The vehicle altitude and climb rate estimation does not add up. The climb rate is almost never around zero during the whole flight. Even at the time when altitude is constant. You can better see this discrepancy at EKF estimation log.
If I am not misreading, IMU0 is the primary core during the whole flight. It can clearly be seen that vertical position and speed estimation are not kinematically consistent with each other. Meaning, for constant altitude estimate, the vertical speed estimate should be around zero. This is only the case for the core that uses the IMU1.
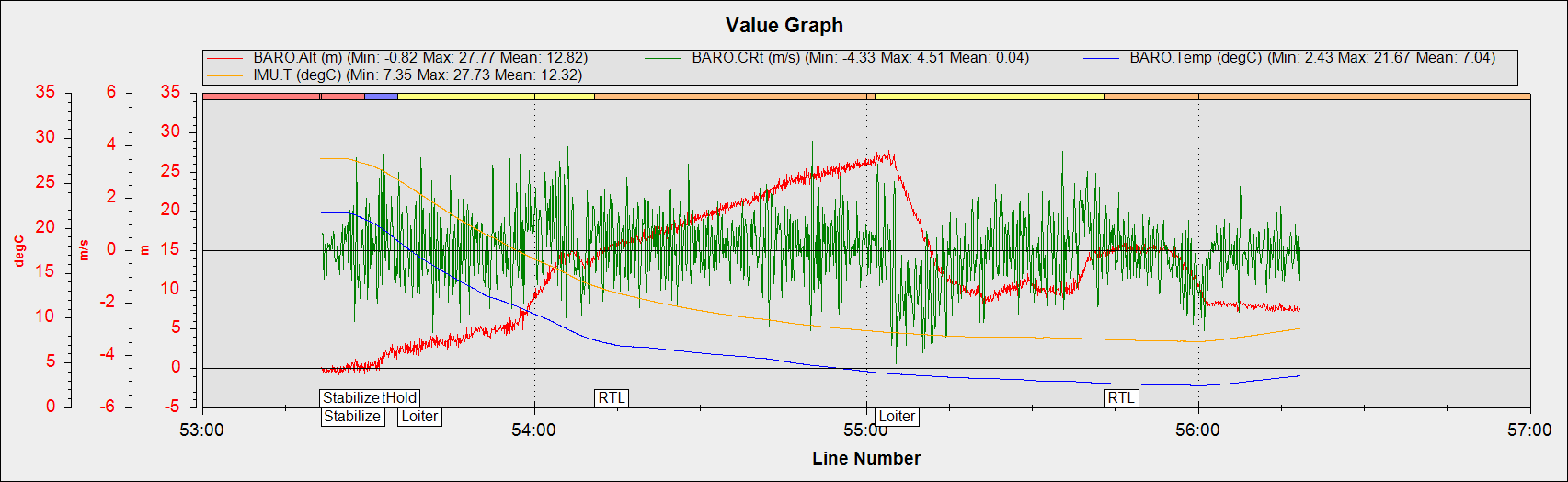
The barometer measurement seems to drift a lot. There is a nearly 20 degrees Celcius temperature and 7.5 meter altitude change for 3 minutes of flight. Is this an original pixhawk or clone? Where is the flight controller located inside the frame?
Seeing that this vehicle uses 12S battery and I don’t have too much experience with a vehicle this big. I will step aside for someone else to comment on your vibration level.
Yes its very big drone ( 30inch props and 17kg weight) for fly with me. Im still working on tuning it but it flying not bad at this moment and rtl always working perfectly ( about 30 times ) because its main operation in this project. I dont know what this one time not landed after retutrn to home point.
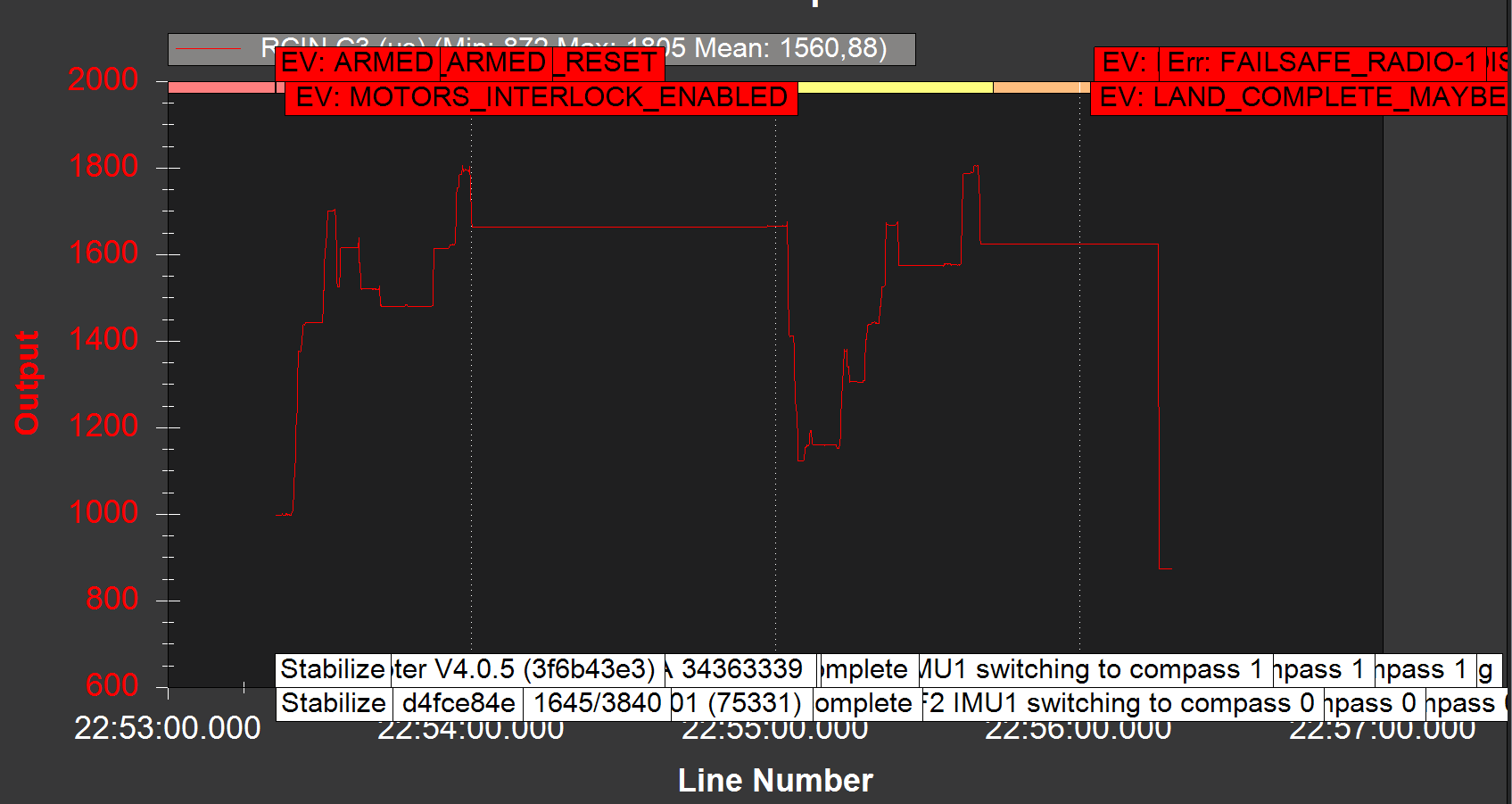
As far as I know, the autopilot does not listen to the pilot throttle command at RTL mode. You can easily check this with SITL.
You might want to check to see if the foam over the barometer inside the flight controller covers the barometer. You can also find a way to cover the flight controller from the propeller airflow to see if it make any difference.
// process pilot’s input
if (!copter.failsafe.radio) {
if ((g.throttle_behavior & THR_BEHAVE_HIGH_THROTTLE_CANCELS_LAND) != 0 && copter.rc_throttle_control_in_filter.get() > LAND_CANCEL_TRIGGER_THR){
AP::logger().Write_Event(LogEvent::LAND_CANCELLED_BY_PILOT);
// exit land if throttle is high
if (!copter.set_mode(Mode::Number::LOITER, ModeReason::THROTTLE_LAND_ESCAPE)) {
copter.set_mode(Mode::Number::ALT_HOLD, ModeReason::THROTTLE_LAND_ESCAPE);
}
}
I understand that this code changing Mode from RTL(landing part) to Loiter or AltHold if throttle is above 1500+deathzone. Now all is clear.
Keep your throttle below %50 while doing flights in AUTO mode.
Also please note that you have some compass messages at the end of the flight.
I think the GPS module should be placed away from power cables.
I have just tested in SITL, the vehicle didn’t listen to the throttle in RTL mode. But there is a parameter for changing the behavior of the vehicle with pilot throttle command PILOT_THR_BHV
The code you provided would require PILOT_THR_BHV parameter to be set to 2 for it to be active. Your parameter file showed PILOT_THR_BHV to be set to 0. Also, this part of the code didn’t run because there is no indication of mode change from RTL to LOITER or ALTHOLD in the log.
Here is the demonstration of throttle response in RTL mode in SITL. I tested it by setting PILOT_THR_BHV to both 0 and 2. I hope it clarifies the behavior of autopilot in RTL mode.
Like I said in my first message, there is an estimation problem which I assume due to the barometer. The barometer reading seems to have too much high-frequency noise. I don’t recall seen this much noise in barometer climb rate data, so this is my number one concern. I should remind you again I don’t have much experience with vehicles this big. This might as well be a vibration problem.
Just a small humble suggestion, if you planning to invest in this big vehicle, at least use high quality flight controller. These pixhawk clones are not known for their robustness.
[quote=“darshit123, post:11, topic:65825, full:true”]
did you check rtl alttitude.i think it is the problem it comes defualt alttitude of 20 meters.
[/quote]its 12 m, its normal after rtl flyed to home xy point at 12m and next fly up.
Yes.I think it is the problem.i also suggest to buy original and good flight controllers like"latest PIXHAWK, DJI naza, DJI NAZA LITE".Thank you very much.I am having an problem with my apm 2.8 that i have uploaded a new firmware and when i i was calibrating RC.it was not showing sticks.only showing switches.If anyone has a solution for this please tell.Thank you.
3DR is long out of the business of making Flight Controllers. Mrobotics was making a direct replacement for awhile but it’s been discontinued. The most popular direct replacement seems to to be the HolyBro Pixhawk4. But for quality Flight Controllers you have Hex Cubes, CUAV, HolyBro and Matek.
I don’t remember what is mine clone and don’t know how can check it.
My friend was using long time ago oryginal 3dr components only to proffesionall projects. He Say that always worked perfectly. I can use one of it for test, if will be good can buy. But if you say that other is better then i will buy better. This project need simply / basic function only. Mot important is quality and reliability.


 AFAIK Mro was the only one making a Reference Board.
AFAIK Mro was the only one making a Reference Board.