Hello, when I am using the sitl simulation experiment, when I try to modify the gpsDataNew.pos and gpsDataNew.hgt values in the NavEKF2_core::readGpsData() function, my drone will split into two. As shown below.
hello,
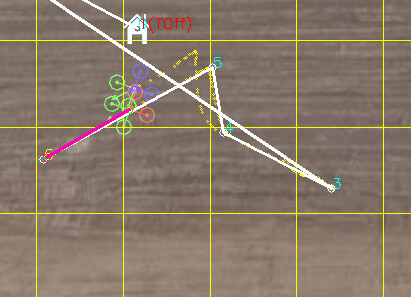
red is the EKF position output, blue the RAW GPS position output
That is to say, the gpsDataNew.pos and gpDataNew.hgt values I modified are the RAW GPS position output?
Hello, where should I modify to unify EKF position output and RAW GPS output.