ArduCopter V 4.0.5
herelink remote control
log file https://drive.google.com/file/d/1Dk6rOSOKSUZRxB85cpZKQIfxG_eWw2C_/view?usp=sharing
I haven’t looked at your log file but It looks like you were in an autonomous mode like AUTO or RTL. In these modes, the aircraft will automatically shutdown after landing. That is how the software is programmed.
It will also be closed if it is in loiter mode
No. It will remain running in loiter. That is a user controlled mode
I should have to upload the log of the LOITER flight Then please help me take a look, thank you
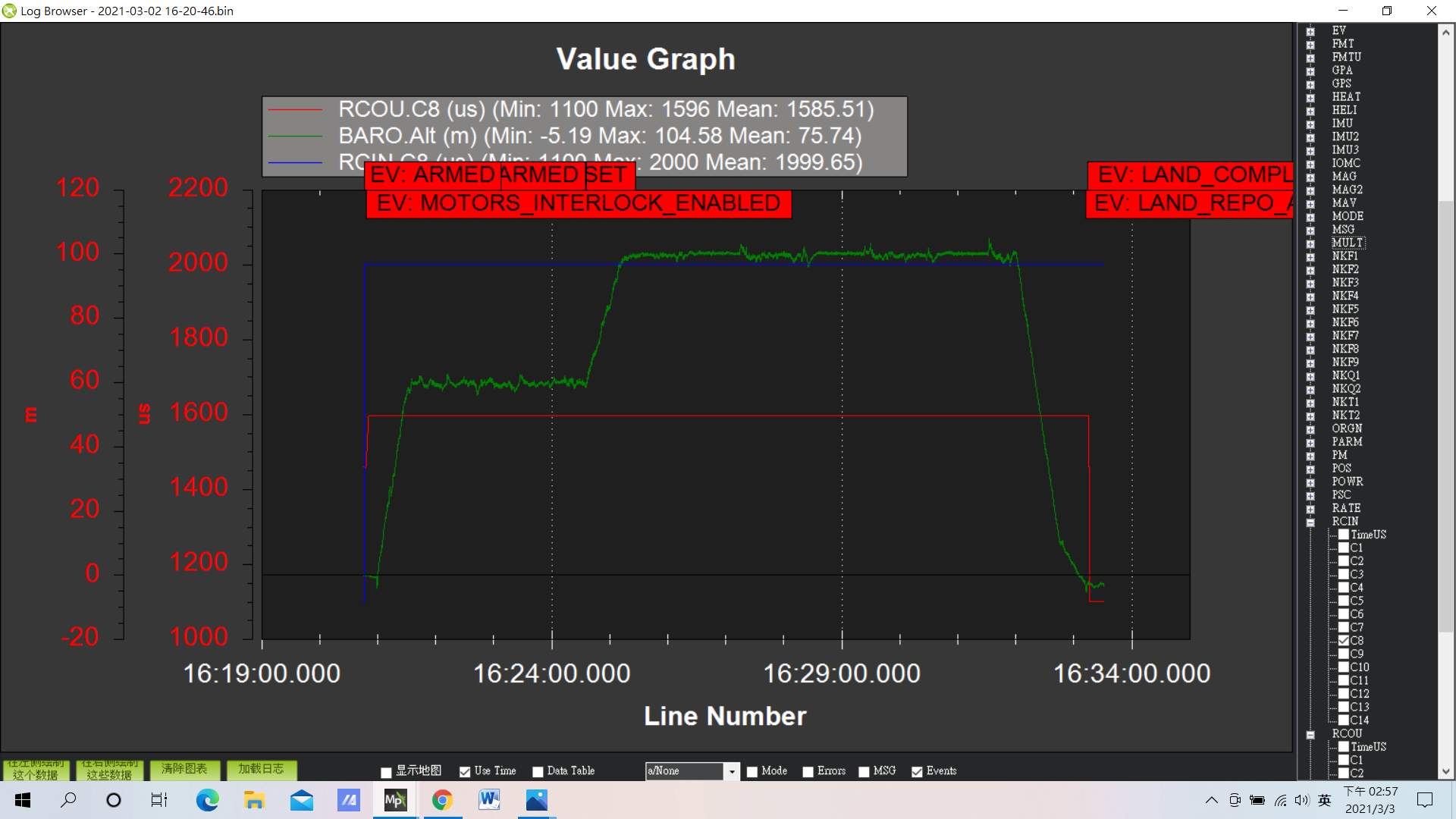
I use loiter to land after flying Please check it for me, thank you
param and log file
https://drive.google.com/file/d/1dcwc4gEt1qfPMPjVRfqww2oDbmWp2DXg/view?usp=sharing
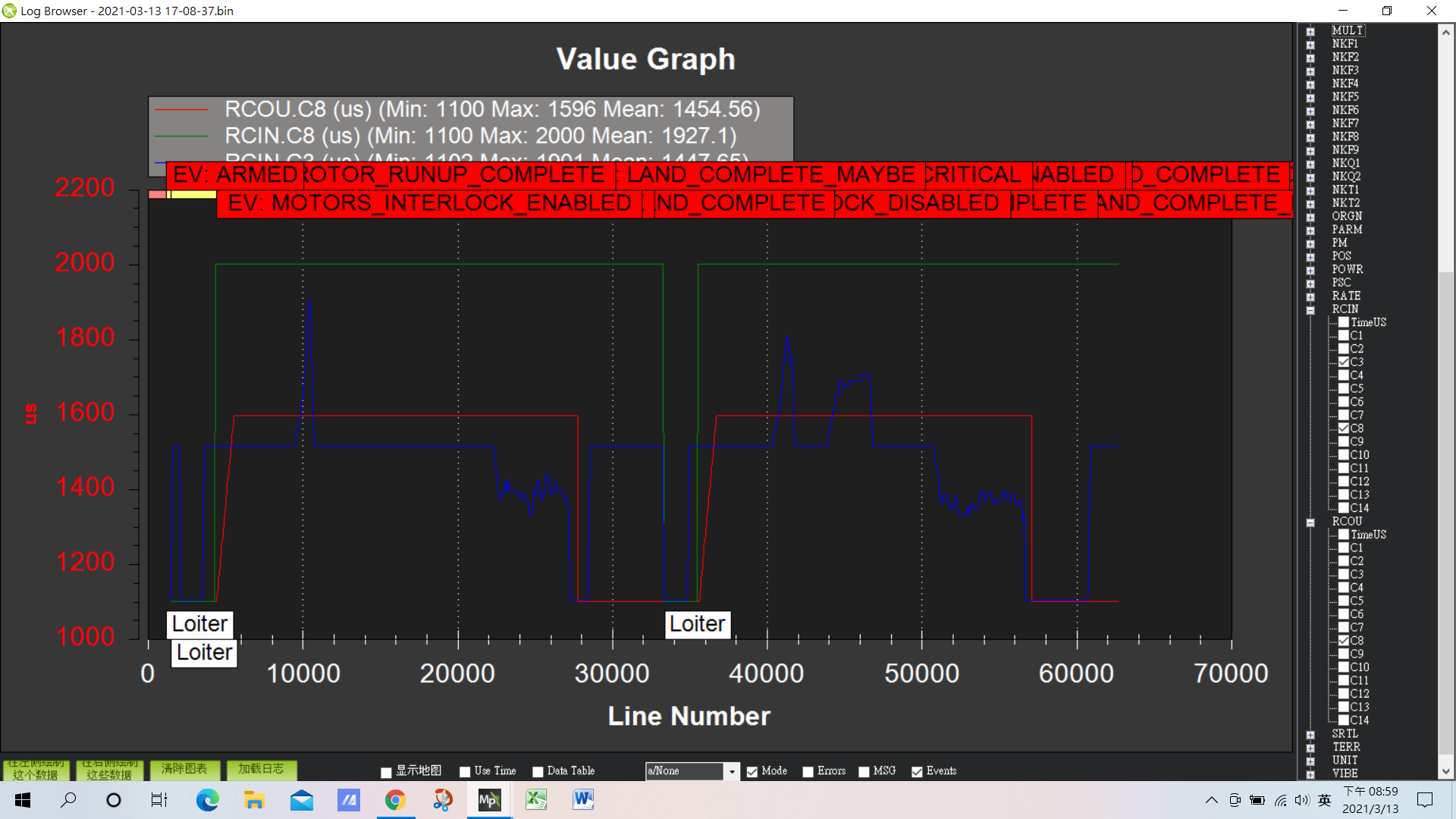
I have not had a chance to look at your log file. I am puzzled by the ch8 output. But we will see what I find
If you use the traditional remote control lever switch, the power will not be cut off when the RC8 is in the high position and the throttle stick is in the lowest position, but it will be cut off after changing the Here Link remote control. This is related to the Here Link button using MAVLINK. ?
@blue0827ww please provide access to your file. The link does not work because you have not given view/copy access.
thanks,
Bill
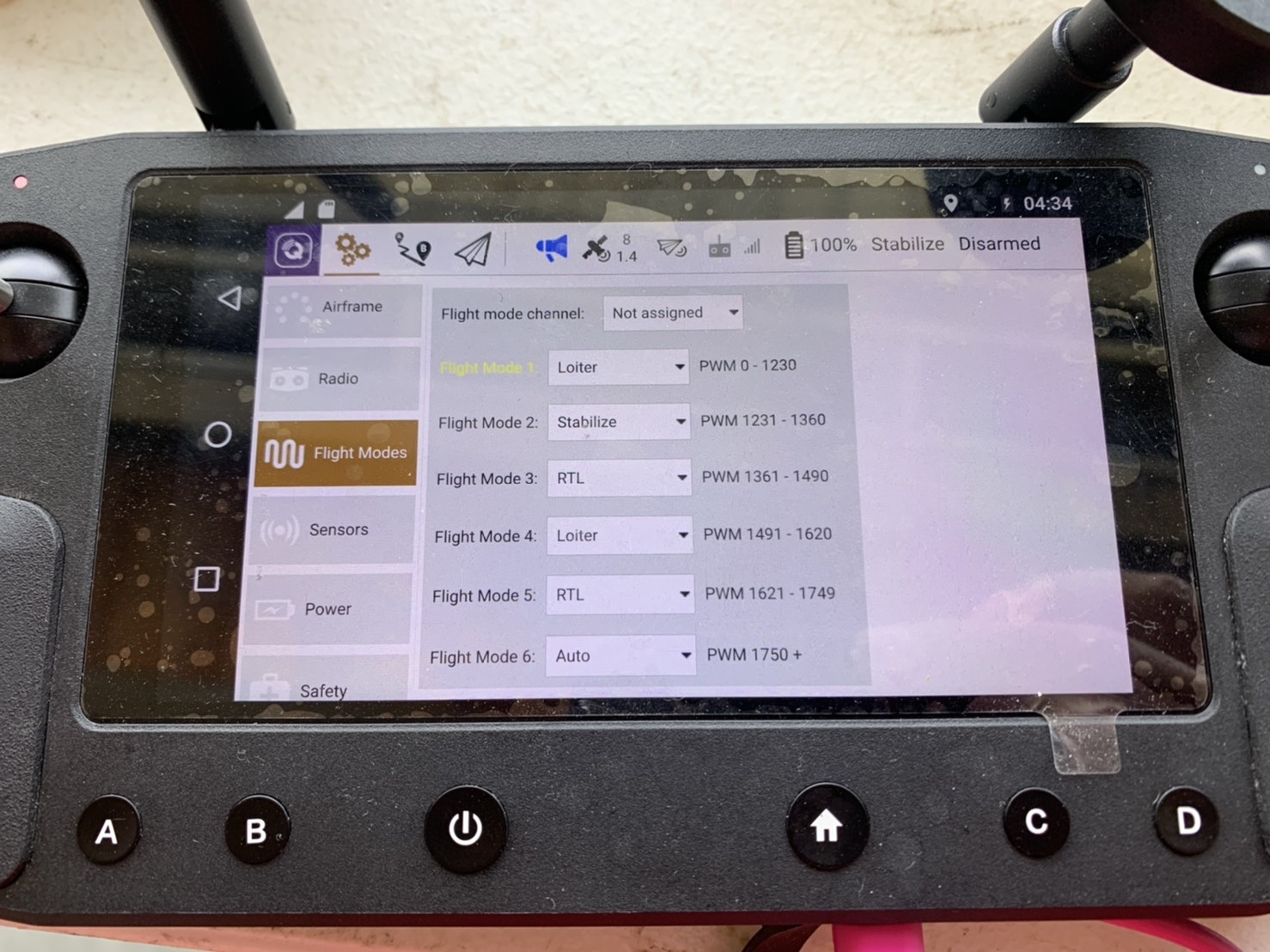
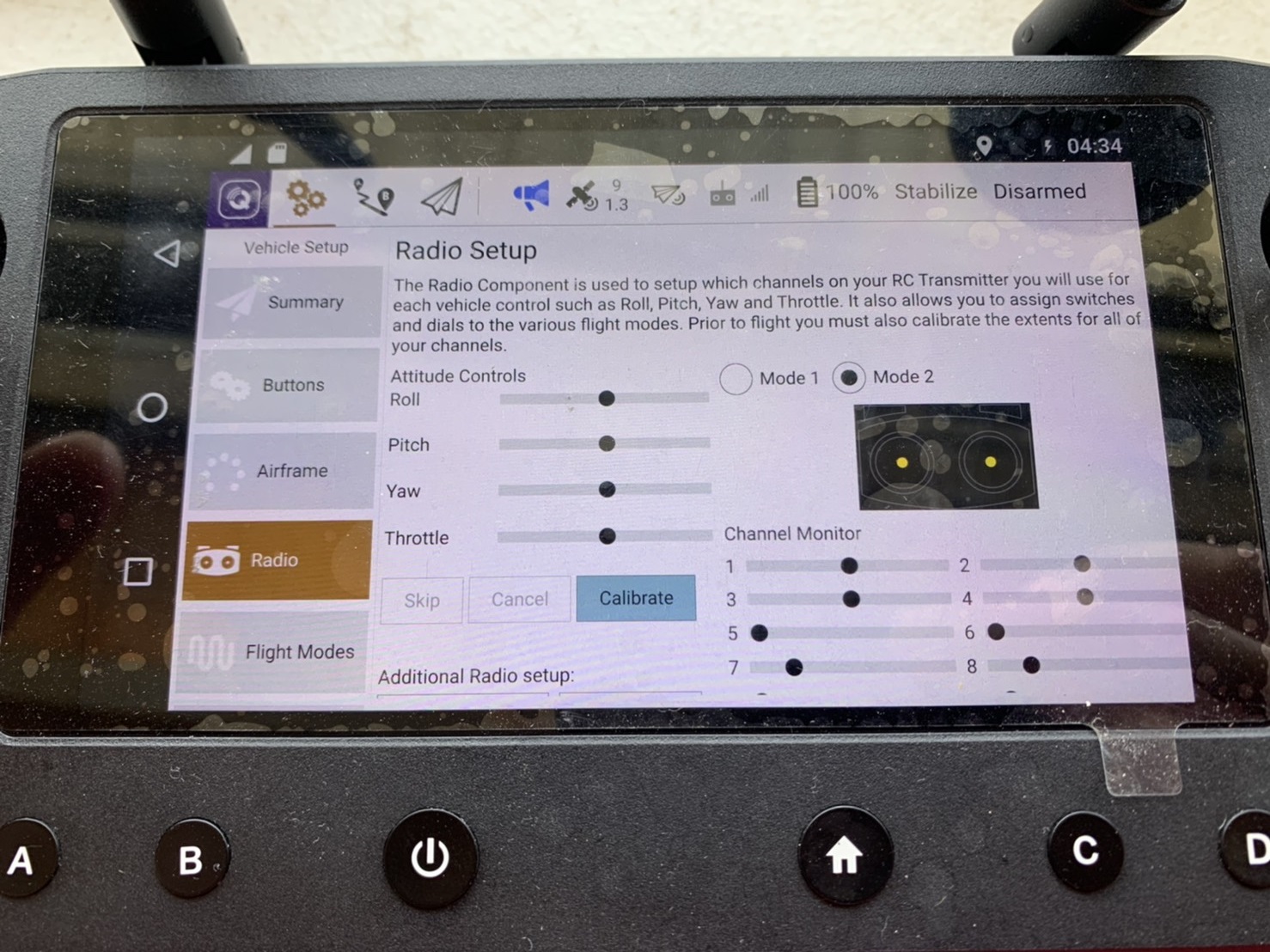
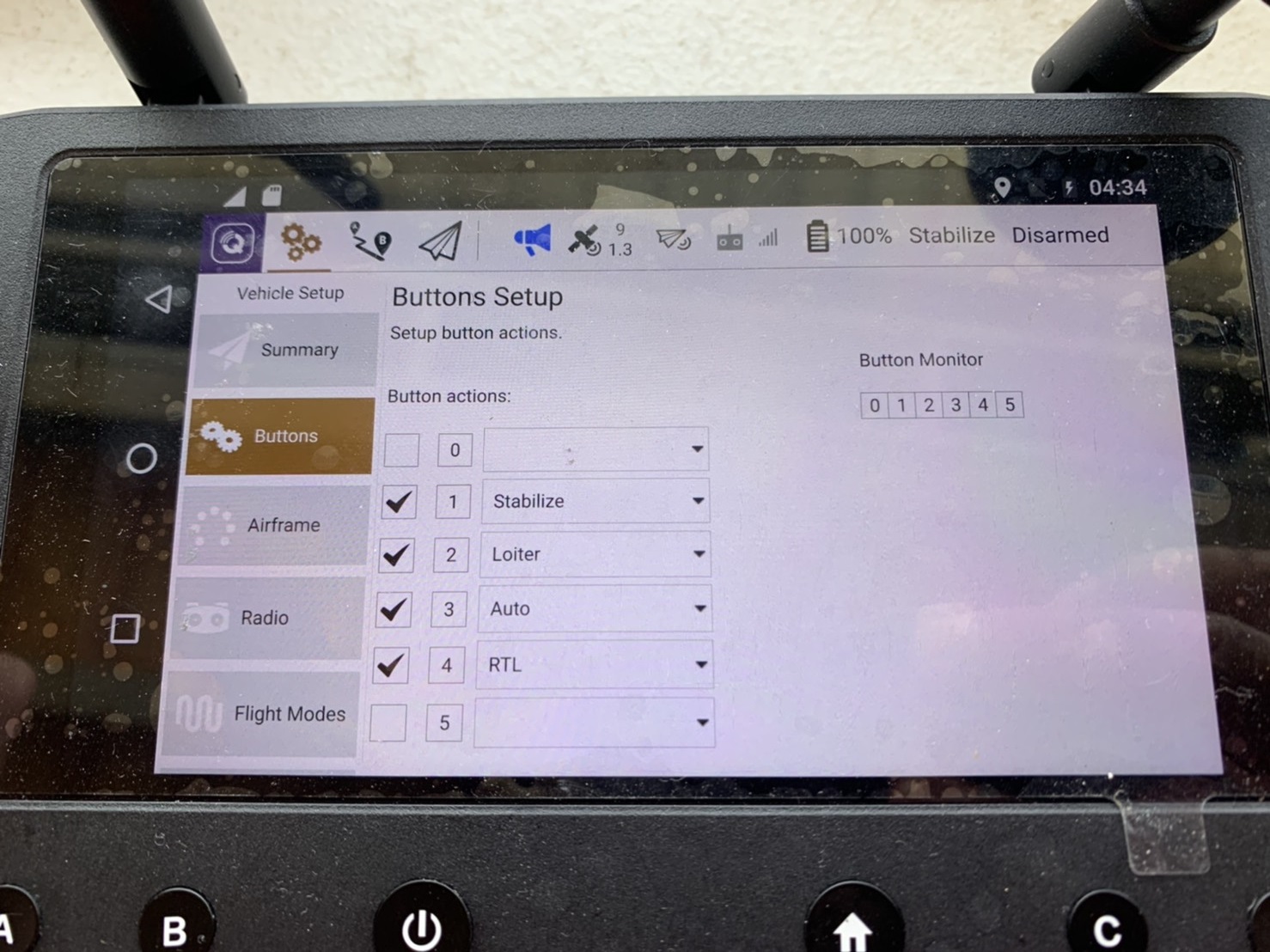
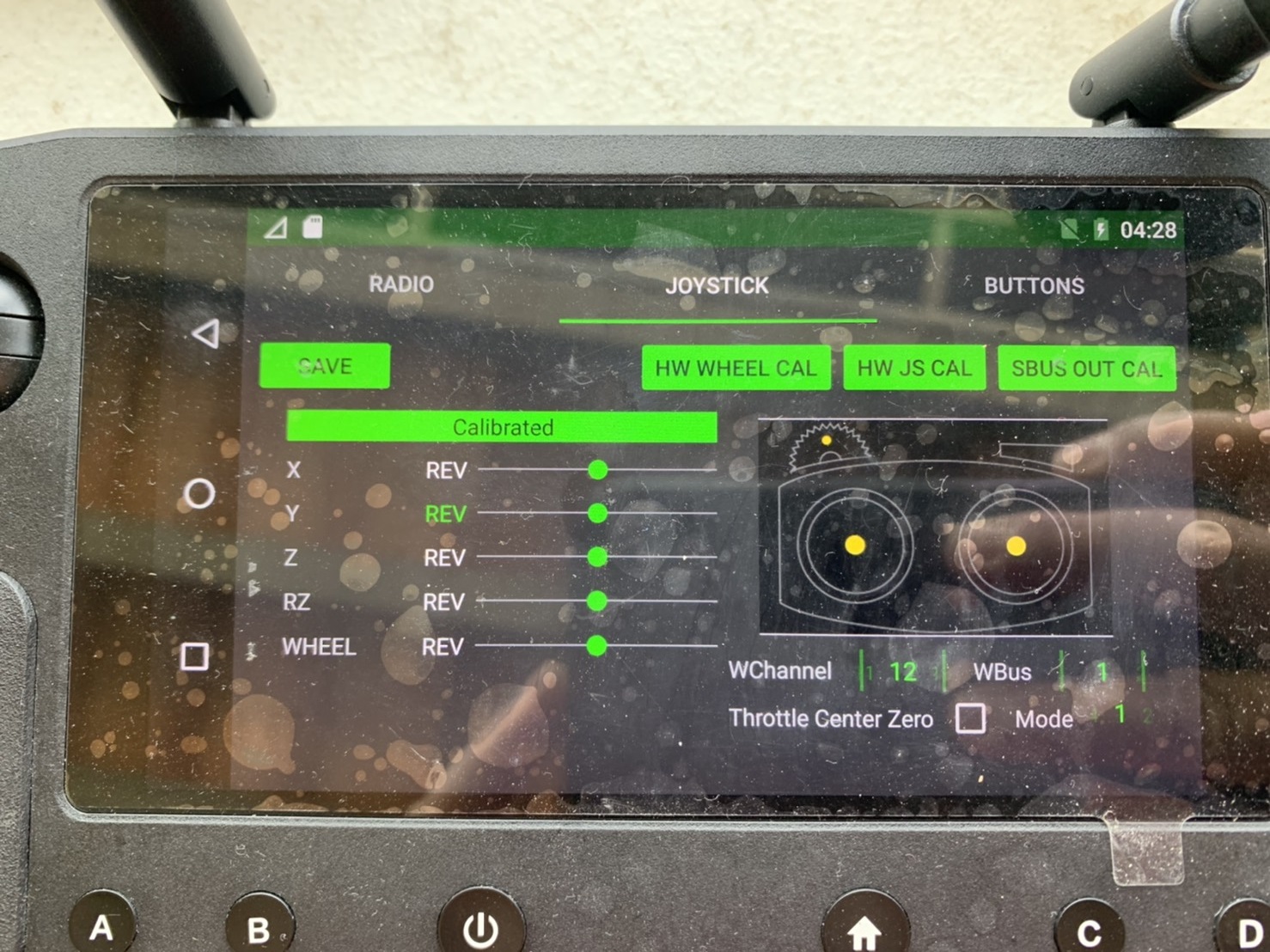
Please provide the configuration of all of the buttons and hardware wheel. I would like to know what RC channels or mavlink commands that you have associated with each button. That would help me determine the problem as well as gaining access to your log file.
https://drive.google.com/file/d/1dcwc4gEt1qfPMPjVRfqww2oDbmWp2DXg/view?usp=sharing
https://drive.google.com/file/d/1EcxR_KMxm1l0hrh719Hqna1eDcamjMmN/view?usp=sharing
thank you very much
What mavlink commands are associated with your herelink buttons. I can see from your param file that rc 8 is motor interlock and rc10 is arm/disarm. It is really disarming on touchdown and that is why your motor shuts down. I’m not sure what would cause this with your setup.
HereeLink remote control screen needs to wait till night to upload
Try disabling crash check 
But the HUD did not show crash after landing
I do fly and the motor does not stop after landing. had disabled the crash detection, might be the reason for the difference.
@ZvikaF I don’t think crash detection has anything to do with this. There would definitely be a message announcing that crash was detected.
@blue0827ww why is your H_RSC_IDLE set to 45? Are trying to have the heli spool up as soon as you arm the aircraft? If this is an electric powered heli then it should be set to 0. I don’t think this has anything to do with the issue but found this setting to be non standard.
looking at your log file again. I noticed that you have RC 10 set for arm/disarm however RC 10 in the log is 874 PWM the entire flight. How are you arming the aircraft if the arm/disarm channel is in the disarmed position?
@bnsgeyer Because I am worried that the power will be cut off when the throttle stick reaches the lowest point, so I set H_RSC_IDLE=45 I know that the standard should be 0. Thank’s
I have set RC10_Opt=ArmDisarm but I did not use the RC10_Opt remote control button to start her
I use the remote control joystick to Arm
@bnsgeyer Will this be the main cause of power cut?
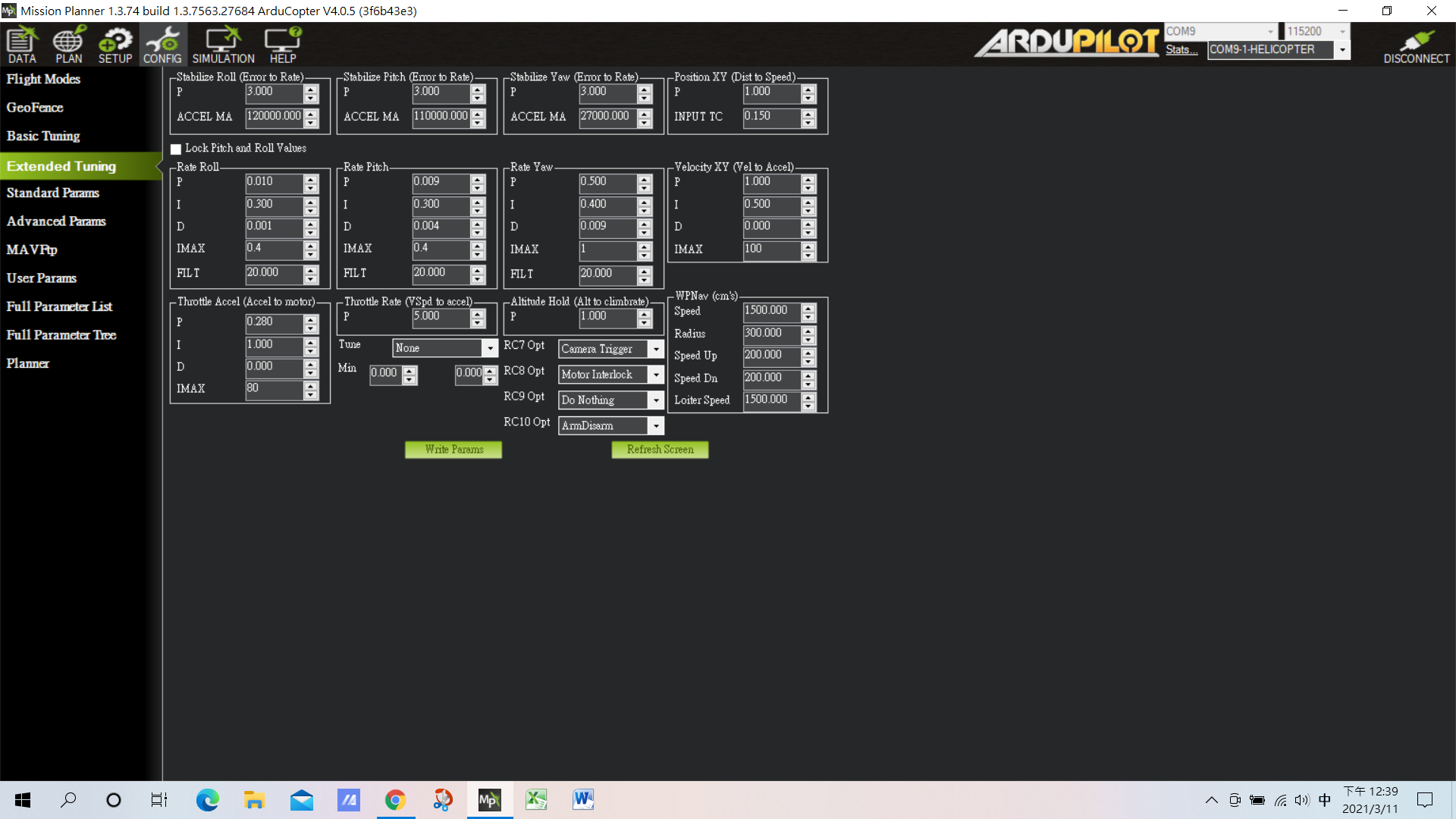

If you don’t use the rc 10 for arming then remove that from your rc 10 options menu and test to see if it stops disarming when you land.
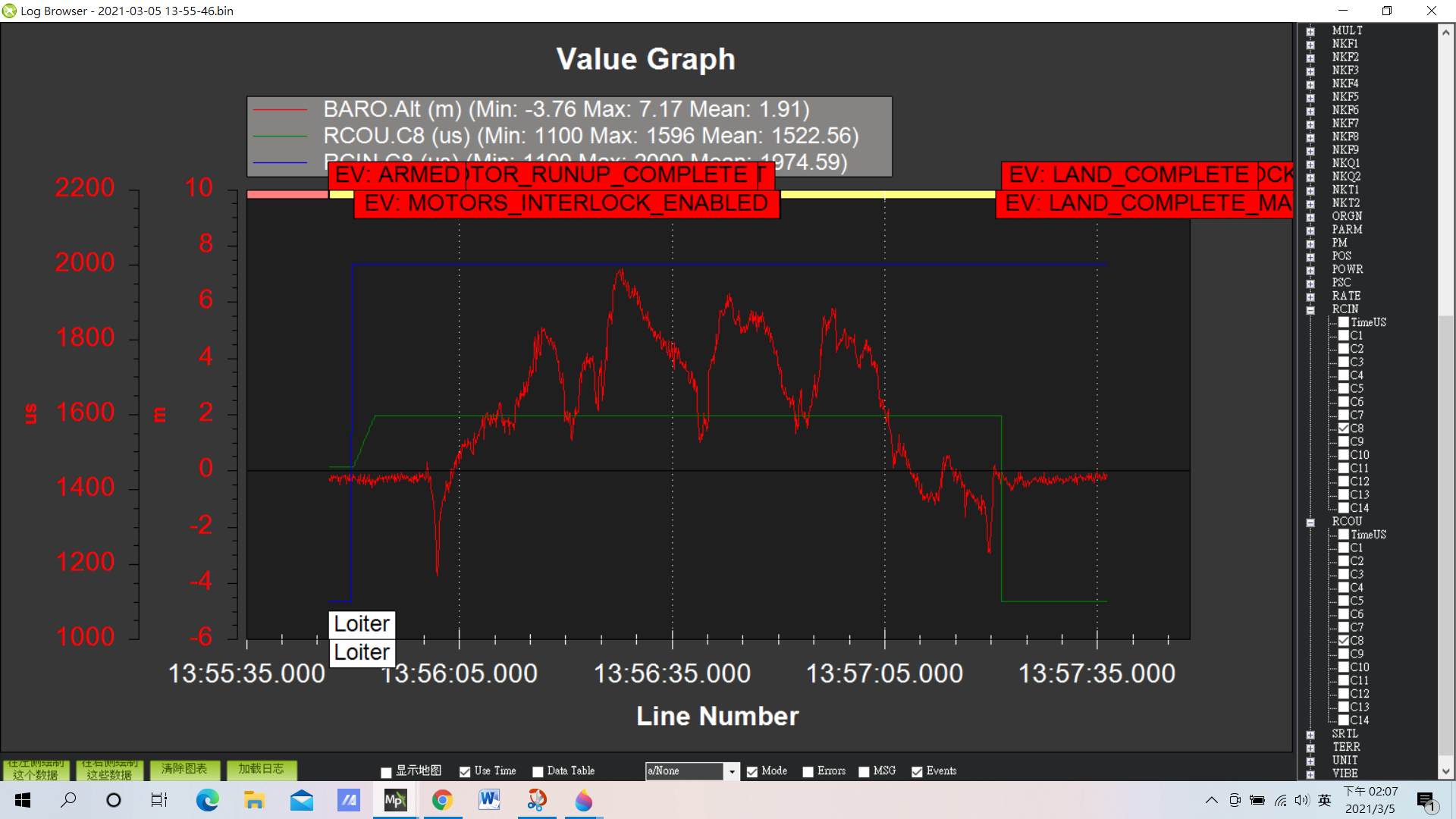
I have cancelled the RC 10_OPT setting, but when landing in LOITER mode, it will still automatically Disarm
https://drive.google.com/file/d/1nMf6Fg3vsQm_68l0SOv5HH3ehiGFEbgs/view?usp=sharing
https://drive.google.com/file/d/1DmShS3pctMOhvd5eo_cLKS8INiV62IvO/view?usp=sharing