I guarantee you, there is no Firmware problem regarding Auto Mission with RTL and Auto-Land at the end. My Cameras running during Auto land under both TR600 and a drone.
I viewed it several times and cannot see a delay of disarming by the FC-ers.
The TR600 has Pixhawk 2.1 and the drone has Pixracer. Both have FW 3.6.rc11 chibios at that time of Missions on 3.&5. October 2018.
@Ricoman Please post you parameters and a link to a log showing this behavior. It would help me determine whether it is the sensor, firmware or your setup.
Thanks,
Bill
Hmm … Thank you very much for your information.
My personal opinion is that the helicopter does not become a disarm after landing
Eventually, sensor problems such as FC (Pixhawk) or gps are narrowed down.
Do you have any comments on other reasons why the helicopter can not land detect?
What about videos, not parameters or logs?
On the analytical side, the parameters and log would be much better
but if you look at the videos, you might be able to catch some important information that I’m missing.
@bnsgeyer was looking at this. I don’t think the issue with the landing detector constantly cycling back and forth from Landed to Land Complete Maybe was ever addressed. If you recall I pointed this out when landing with my gas choppers and letting them run at flight idle for cooldown.
I don’t recall ever having a problem with the system shutting down autonomously if the H_LAND_COL_MIN, and H_RSC_CRITICAL is set properly. But I can see where that constant toggling of the landing detector state could cause an issue in anything but a manual flight mode with the helicopter wanting to go into dynamic rollover if the system doesn’t trigger land_complete.
I don’t test this very often, as I don’t believe in using it. But I could run a short flight test to verify there is nothing wrong with the firmware with proper settings.
@ChrisOlson Yes I understand what is causing the toggling and have fixed it in the spool logic implementation. It only occurs on manual modes. It is very clear in these logs for RC12 that the land complete maybe and the land complete flags never post. It is also clear that the flight controller is still commanding some movement across the ground which I believe is cause the aircraft to want to tip over.
I was planning doing a quick test myself. I’ll let you know what I come up with but we have evidence from Fred that not everyone is having this issue.
I’m preparing the Raptor for a short test flight. I have to put the stock firmware back in it. I’ll report back on what I find.
I have rendered the end of each mission from early October for you to see and hear yourself.
Fred, was that first one some sort of drone? It didn’t sound like a real aircraft. More like a big gnat that somebody suddenly slapped with a fly swatter.
Yes, it is that Quadcopter I always fly and try each mission before the Helicopter goes up for the final with my expansive gear. The sound is from the 4 motors.
So I had conducted an RTL with my heli as well. No issues. Landed and auto disarmed. @Ricoman and @retromix I am no sure why your heli’s are trying to overturn on the ground after landing. Looking at @retromix data, it appears that your getting 15-20 satellites with a very good HDOP (<0.8). I’m sure that still means that you could get some drift but I had HDOP around 0.9 and had no issues. I’m sorry but currently I don’t have a good answer as to why your heli continues to want to tip after landing in auto mode.
In the big zip file from @retromix I noticed in the params that H_LAND_COL_MIN is set to zero. IMO this could cause a tipover if it tries to pull negative pitch during auto land when the engine is running at full power. And Mode 2 throttle is being used, so there is no modulation of engine power if it would try to pull full collective down on the ground.
H_COL_MAX,1637
H_COL_MID,1431
H_COL_MIN,1365
H_LAND_COL_MIN,0
H_LAND_COL_MIN should be set to a value that is approximately zero pitch with symmetrical blades. Helicopters do not like pulling negative pitch on the ground. It causes vibration, ground resonance issues, and the vibration spikes alone from doing this will prevent the landing detector from deciding if it has landed. So it never actually gets the collective all the way to the bottom to activate the shutdown.
With the above collective settings I would say a value of 200 would be slightly negative, and 250 would be about right for zero pitch for H_LAND_COL_MIN.
In my experience, this doesn’t mean anything. GPS is notoriously inaccurate and it drifts all the time. If you have a helicopter on the ground in any GPS mode, the helicopter is running and creating thrust, it’s in danger of tipover. I’ve had them try to tip over in Loiter during spooldown. They are not like drones that just give up when you cut the throttle.
The landing detector should shut it down right away to prevent the the issue with GPS drift causing a rollover by reducing thrust fast enough to try to reduce the chances. But if it sits there running at full power in a GPS mode it’s not if, it’s when.
It is a kind of “use at your own risk” type of system if you like autonomous landings.
OK, that’s why it sounded so strange. I didn’t realize you had one of those.
Wow … it’s awesome.
No vibration, tail swing, or resonance is seen when taking off.
Take off really quietly.
Landing is also beautiful.
Yeah that was kind of my point that until it declares land complete maybe, drift of the GPS will try to tip over the aircraft. These aircraft may be taking longer than usual to declare land complete maybe thus causing them to come up on the sticks to save the aircraft.
This is a good point. I had looked at @retromix vibes and they were a little higher than we typically like in flight (15-20) and then when the aircraft was landed the vibey quickly rose to over 50.
From the one tlog I looked at it appeared to work fine at least once. Those tlogs are huge and don’t have time to play the whole thing back. But it looks like the “mission” consists of climbing vertically to a waypoint or two, and then landing. The engine is started a lot and appears to quit. Then is disarmed, rearmed and restarted. I see a lot of what looks like really hairy flying taking place in Stabilize.
But I did pick out once where it landed in Auto mode and shut down by itself.
The vibrations are excessive on x-axis, regularly going into the warning area. No real clipping that I saw. But the helicopter is not going to fly or handle real good with vibrations that high.
Must be a four-stroke gas because the engine is running around 6,500-6,700 rpm and that is configured in the settings - tach pin is set to 51 and type is set to 2.
Otherwise, I can’t pick much out of those logs either.
You may be looking at the log from rc6 where the auto disarm actually works. His initial post contains a log from rc12 that doesn’t work and I determined that it was because the land complete maybe and land complete flags never posts. He jumps in and sets stabilize to save the aircraft.
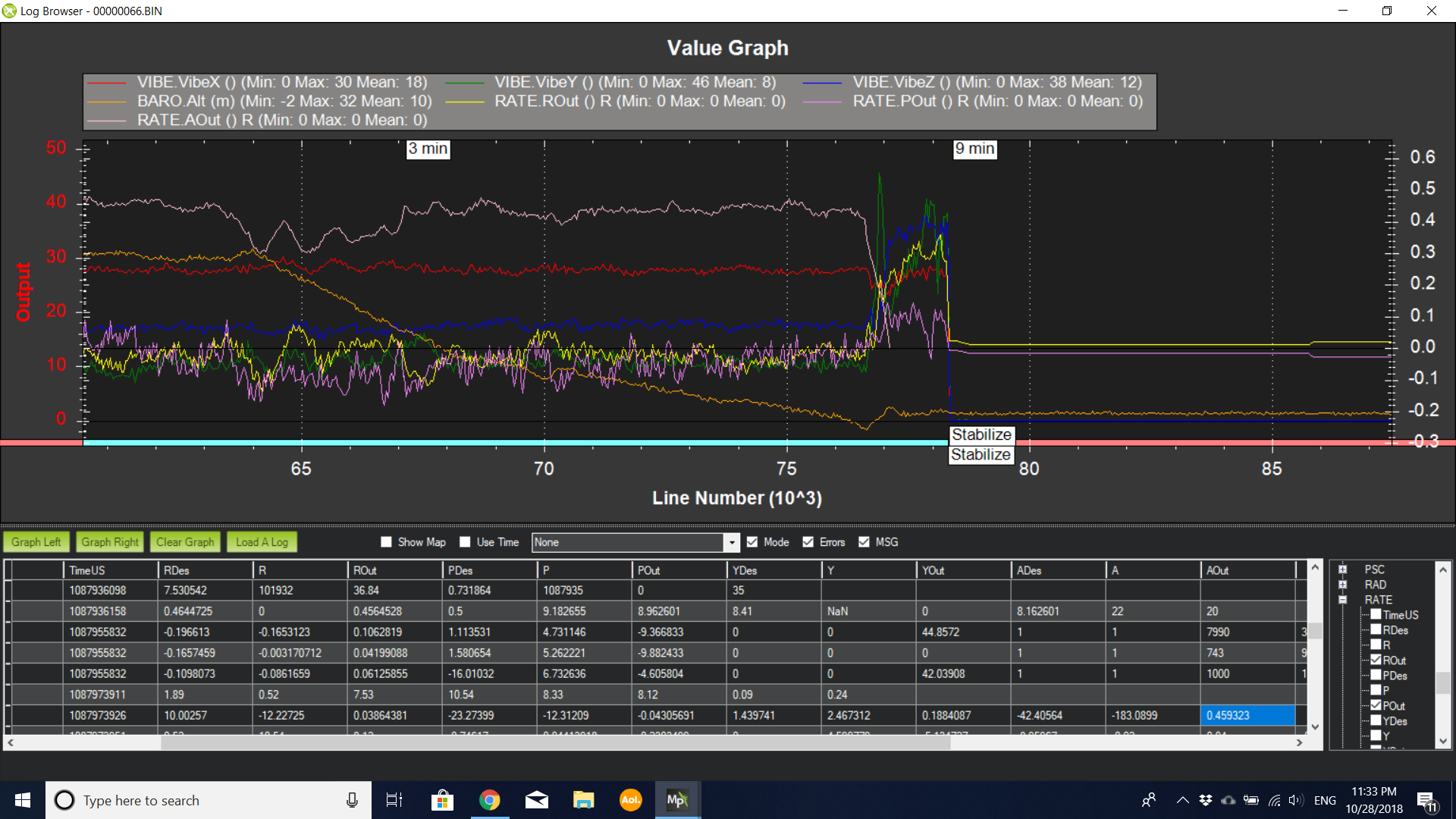
Here is a autonomous landing using rc12. This is a plot of the vibe x, y and z with the Rate.Rout, Rate.Pout and Rate.Aout. Rout is the roll output from the rate controller to the motors and Pout is the pitch output from the rate controller to the motors and Aout i believe is the collective to the motors. All of the outputs to the controllers have their y axis on the right. the vibe signals have their y axis on the left. It is interesting to note that it does seem that the vibes increase as collective is coming out (light pink trace around 0.4 then lowers to zero. It is also interesting to note that vibe y climbs very similar to how the pitch output is increasing after the collective comes out.
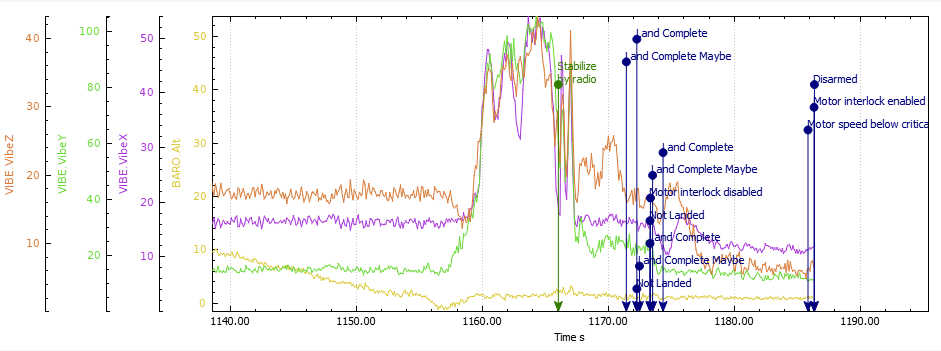
In logs for rc6, the vibes act very similarly but the vibes only go to 40 or 50. Here an auto landing with a successful auto disarm
It is interesting to note that auto disarm occurs in roughly 4 seconds after touchdown for this landing. In the rc 12 version, its roughly 10 seconds before he switches to stabilize to save the aircraft.
I’m just not sure what changed between the two versions to cause this
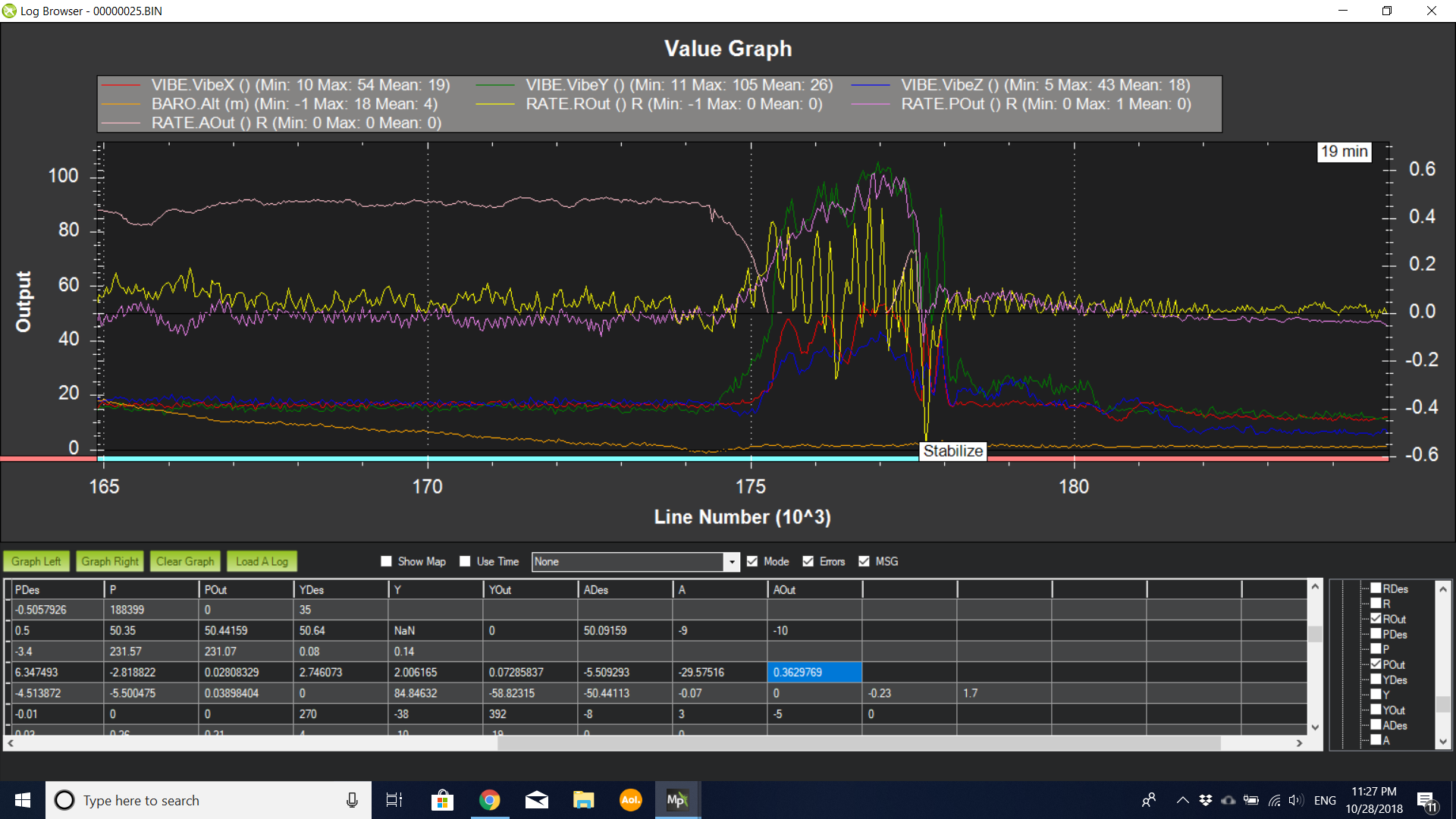
Well, this is what I’m looking at in that log 25.BIN. The vibrations spike at over 100. This is a gas helicopter, and combustion engine heli’s have a really steep learning curve compared to electric. If it’s not tuned right, you’re going to get this. If this is a F-50 four-stroke, which I suspect it is, those are really bad.
IMO, there is just no way the system can know what’s going on as far as landed state with vibration that high. It is possible it is trying to pull too much negative pitch, and that’s causing some of it. But I know part of it has to be the engine too. You can strap a gallon can of curdled paint to one of those GX9’s and it will be thoroughly mixed by the time you land with it (don’t ask me how I know). I honestly have not seen one (yet) that has ever flown decent with a Pixhawk on it, straight up without some sort of downstream FBL unit that can handle the vibration from those things.
But I see the vibration drops to more acceptable levels once it switches to Stabilize. And then the Land Complete comes right on. So I think it’s vibration. I’d try setting the H_LAND_COL_MIN to a more reasonable value like 200 or 250.