I’m setting BLH escs these days. These two parameter looks the same, what will happen if I forgot set another one someday?
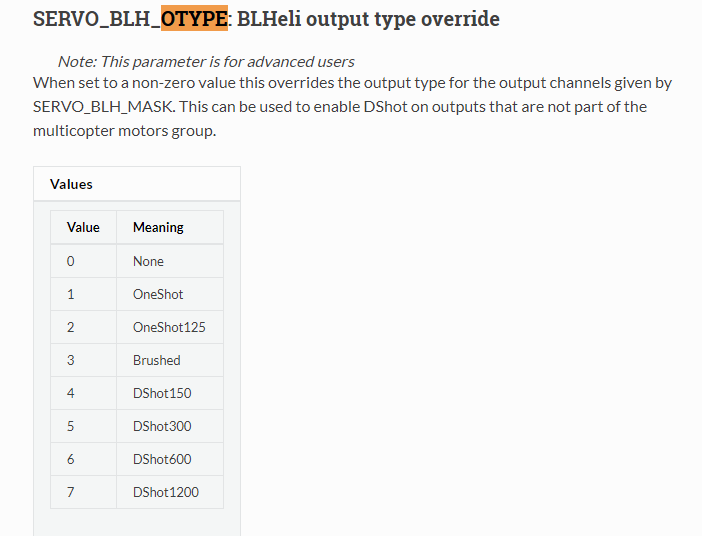
_OTYPE allows you to set Dhot for only the channels defined by _MASK. This allows you to mix Dhot outputs with PWM outputs with respect to channel groups. On a craft that has Dshot enabled ESC’s and Servos. Like a VTOL for example.
1 Like
Thanks! Very helpful.
Is it possible to setup channel 1 and 2 with brushed motor with RELAY and the other channels NORMAL PWM?
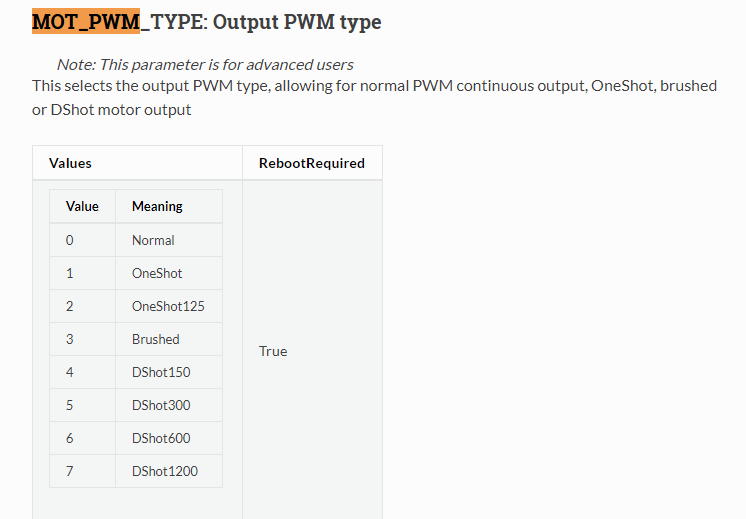
I thought by setting MOT_PWM_TYPE=0 (NORMAL) and SERVO_BLH_OTYPE=3 and *_BLH_MASK for channels 1 and 2 I would get this behavior on PIxhawk CUBE ORANGE, but I’m not.
What am I doing wrong?