Hi,
I’m doing a research project on on multirotor platform running Arducopter 4.1.2 on a PixHawk CUAV X7+ Pro. I was looking for the pushing rate of the main states from the EKF3 (e.i: x, y, z, phi, theta psi, x’, y’, z’, wx, wy, wz) and the frequency of the mains PIDs controller (e.i: position control, velocity control, angle control and angular rate control).
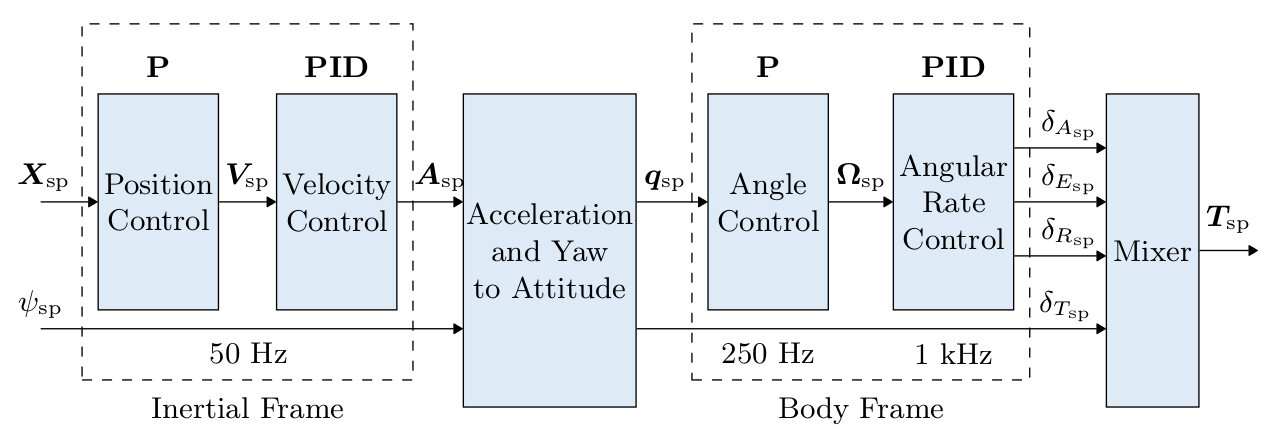
I saw on the PX4 website that they have their position control diagram with the different frequencies (see linked image), but I didn’t see the frequencies used by Arducopter on the ArduPilot website or in the forums. I’m also not familiar enough with the Arducopter code to know where to search in the source code. I was wondering if someone more familiar with the control architecture could hep me?
Thank you