What exactly is the difference between the pairs: ATT.DesPitch & ATT.Pitch and PIDP.Tar and PIDP.Act? I would assume that the desired pitch attitude (ATT.DesPitch) would be the same as the PID controller’s target pitch (PIDP.Tar).
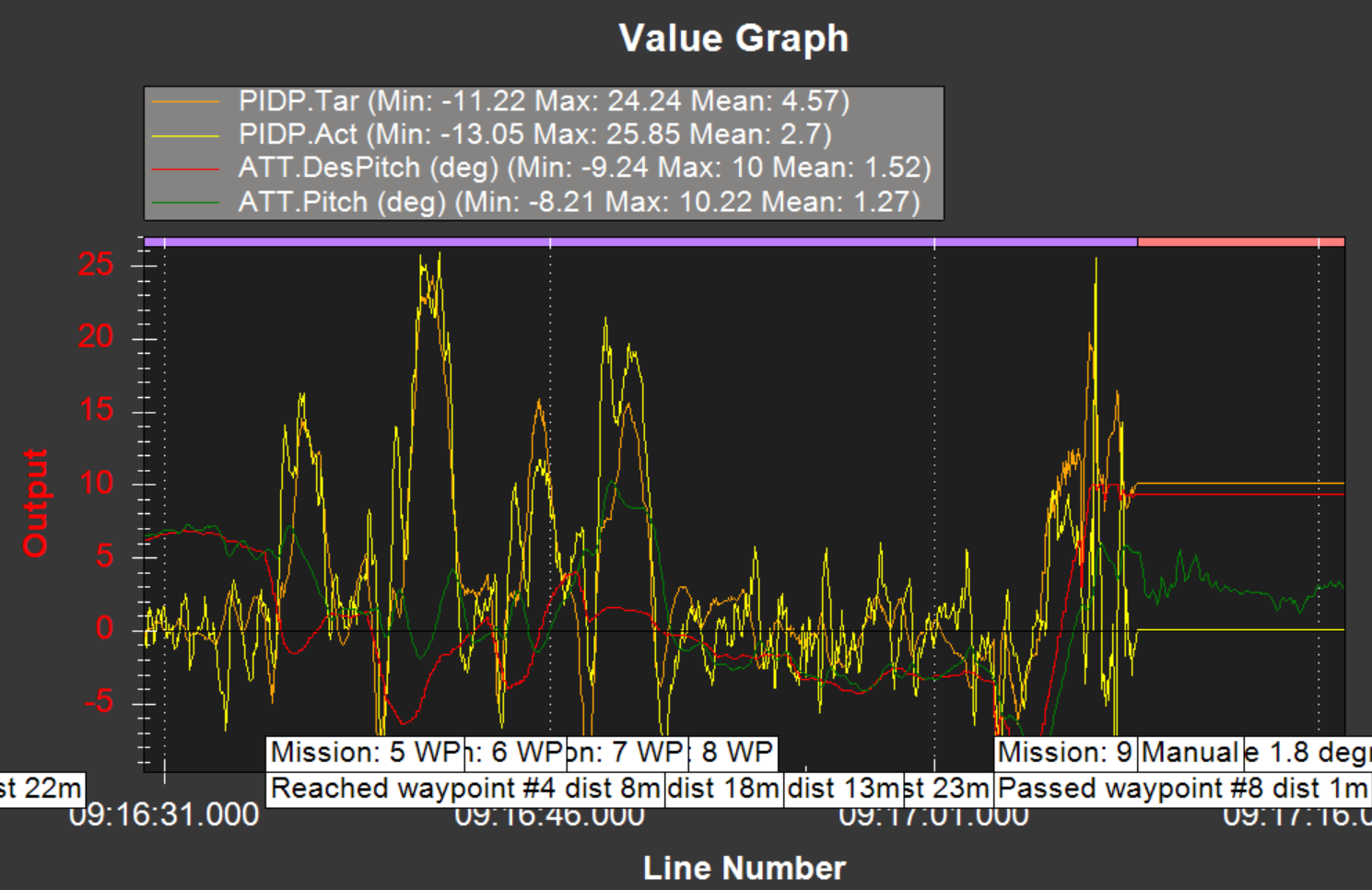
For more context, I’m trying to debug why my ATT.Pitch isn’t tracking ATT.DesPitch very well (green and red lines below) although the PIDP.Act seems to be tracking PIDP.Tar decently (yellow and orange lines below).