I was just comparing the parameters of my two copters. They’re very similar, and the reason I did it was out of curiosity, to see the differences, and possibly adjustments. While doing so, I noticed that one one copter, I have SR2_RC_CHAN set to “0,” and on the other, I have it set to “2.” I have no idea the reason why, or if I’ve made a mistake. The change happened on or around the time I upgraded to v4.3. I may have inadvertently changed it while adjusting the ADSB. I can find very little information online about SR2_RC_CHAN.
What is it doing exactly? Anyone know? Surely, someone knows…
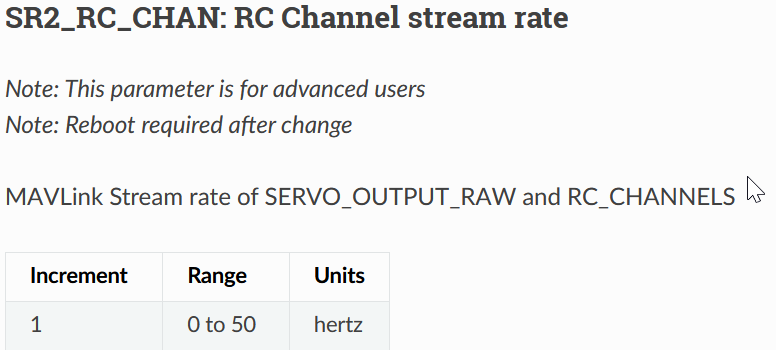
but what is “stream rate” referring to? Is this the speed that channel 2 is being transmitted at? What use case would change this parameter, for example? Can you elaborate any?
I’m trying to figure out if there’s any reason I would’ve changed this from 0 to 2, because I can’t think of any reason I would’ve.
These days we dont even bother to set these stream rates except for older OSD units.
Mostly the GCS or yaapu telemetry will request the items it wants to know about at the rate it wants, and the SR* params are irrelevant, or potentially causing flooding where not required.
The SR* params could be set to 0 unless you’ve got a specific reason to change them.
These must be the defaults for the USB port, usually connected to a GCS
SR0_ADSB,0
SR0_EXT_STAT,2
SR0_EXTRA1,4
SR0_EXTRA2,4
SR0_EXTRA3,2
SR0_PARAMS,0
SR0_POSITION,2
SR0_RAW_CTRL,0
SR0_RAW_SENS,2
SR0_RC_CHAN,2
The other SRx params are all zeros, yet my telemetry and all still works as expected.
That’s my take on it - happy to be corrected.
EDIT
I zeroed out all mine on SR0 and rebooted, reconnected to MissionPlanner and the HUD and all still works as per normal and the SR0 params are back at their previous values
So there you go - either you cant wipe out those defaults in SR0, or MP puts them back as soon as you connect (I cant tell which)