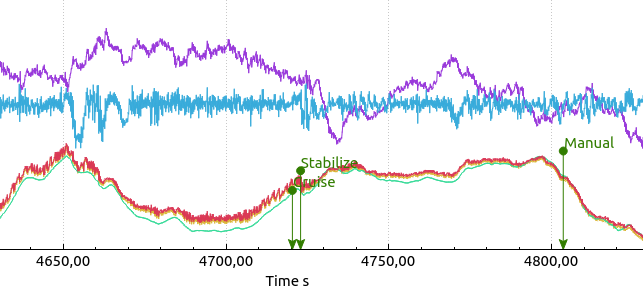
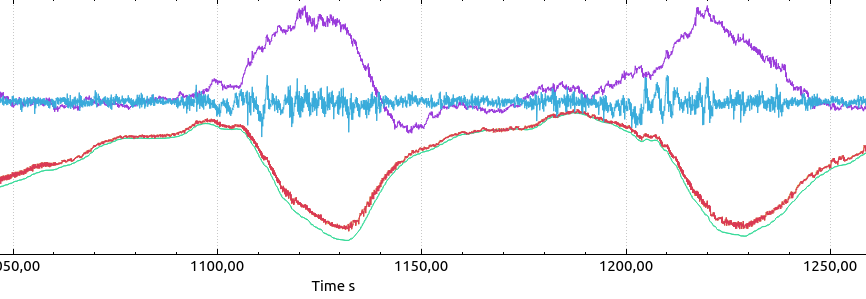
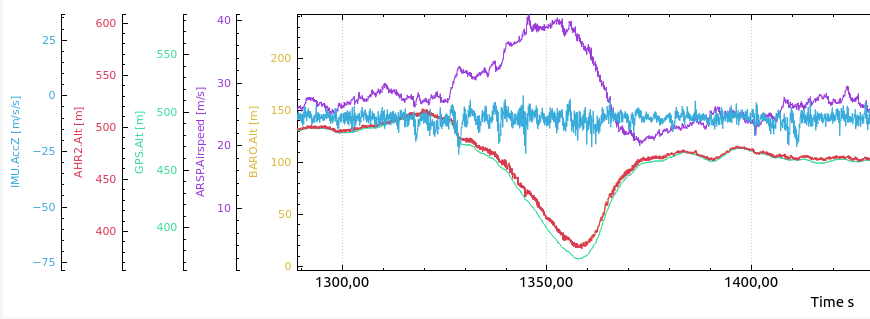
As the speed changes for a fast lowpass, the altitude errors become dangerously high.
GPS indicated altitude seems good, but the EKF and pressure based altitude is vastly over-estimating it’s altitude.
it’s not aliasing, it is just the usual venturi effect of airflow causing a change in pressure. In this case at high speed the flow in the fuselage is causing the pressure to drop, leading to a higher alt reading. The degree of change is a bit higher than usual, but not as high as I’ve seen.
The only things you can do are:
don’t fly close to the ground at high speed
change the airflow in the fuselage to try to reduce the effect, maybe with more air vents
use GPS altitude (which risks poor GPS alt)
This effect is why big aircraft have a special static pressure location to measure barometric pressure.
@tridge than you for your insight.
This one is equipped with an pitot-tube and a digital airspeed sensor, I (apparently incorrectly) assumed that we were getting static pressure from that sensor’s static ports.
Why don’t we use the external sensor when available?
Pitor tube sensors only provide differential pressure. Measuring airspeed through separate static and dynamic port absolute pressure sensors (like barometers) would only create massive uncertainty in the dynamic pressure reading. Which is never a good thing because the effectiveness of the control surfaces is based on dynamic pressure.
Documentation about the external barometers is here.
@TunaLobster Thank you - I did not realize that we only receive the differential pressure from those sensors. Will consider installing a external sensor.